In this episode of our webinar series on web guiding fundamentals, we explore the installation and operational intricacies of a steering guide. We cover the mechanics of a single roller installed on angled raceways, its bending action, and essential guidelines for entry and exit spans. We discuss the importance of maintaining a 90-degree exit span angle to minimize stress and prevent issues such as wrinkles and web tear.
Transcript
Show full transcript (631 words)
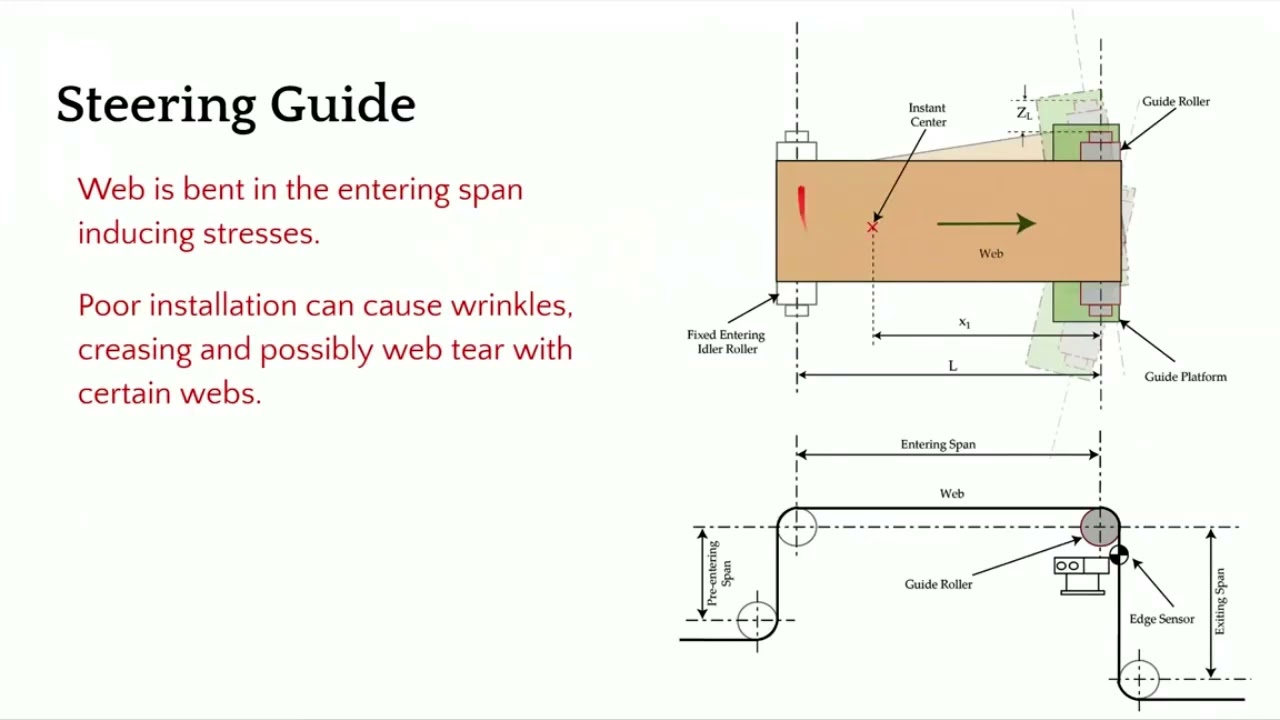
[Music] The second choice for us would be a steering guide. In terms of how it works, it's a little bit different. You got a single roller. This is the top view and this is the side view.
This roller is installed on two raceways at an angle. The web guide forms an arc like that. It moves and forms an arc back and forth. That's how we are changing the axis of rotation.
In this web guide, we are creating a bending. So there is a bending action here. It's displacing as well as bending. In terms of the entry and the exit span, there are some guidelines for that as well and we'll go through that.
This is not an ideal choice for us because it's bending. So it's introducing stress. If it's not installed properly, it can cause wrinkles, creasing, web tear, and edge stresses. In terms of installation, what do we need to look for?
We need to make sure that the exit span is perpendicular to the plane of motion of the web guide. The main thing is to make sure that the exit span is in pure twist. This allows us to have the least amount of stress in the web. So we want to do that.
Now the entry and exit span length is also depending upon the stiffness of the web. You typically need a longer entry span for a rewind guide because the motion of the web guide or the displacement of the web happens because of bending. So you have to follow those guidelines in terms of if you have a stiffer web, you need to have a longer span so that you can allow the bending to happen. Normally it's about 1 to five times the width of the web.
And then the exit span can be half a web width. And there's also minimum formula for finding out the minimum span length. In terms of other things here, let me talk a little bit about the instance center. Like I mentioned, there is a raceway, two raceways here, and they are angled so that you can have the web guide go around an arc.
And the center of the arc is called the instant center. This is important. We need to make sure that the instant center is within this span. and it's at a certain distance about half the length of the span or up to 2/3 the length of the span.
These are all numbers coming from the dynamic model of the web guide and the dynamics of the web itself. If you don't follow those conditions, then you can have a web guide over steering, under steering, creating an awful lot of stresses, maybe wrinkles, slack edges, tight edges and all those kind of things. The main things that we want to look for is this angle. Make sure that it's 90° and then you have an entry span that is pretty long.
You can have different wrap here. We don't want to go more than 45° on either side. When you do that, you're adding twisting. Uh so whenever it goes away from this 90°, it's not pure bending.
There is bending and twisting in mold there. And then we want to have an angle here because when you put bending stresses here, you have the possibility of what we call as moment transfer. So the motion of this roller can actually move the web upstream of the guide roller. In order to avoid that, we want to have certain conditions here.
And we also want this span shorter so that it becomes harder for that moment transfer to occur. Those are some of the guidelines for installation of a steering guide and again sensor as close as possible. [Music]
In this webinar episode on web guiding fundamentals, we delve into the accuracy of web guides, discussing various factors that affect their performance. We explore how steady state and transient errors can influence guiding accuracy and highlight the importance of machine quality, material properties, and proper installation. Additionally, we cover the design requirements necessary for achieving optimal web guide performance, emphasizing the need to understand conditions like web speed, thickness, and tension.
Transcript
Show full transcript (491 words)
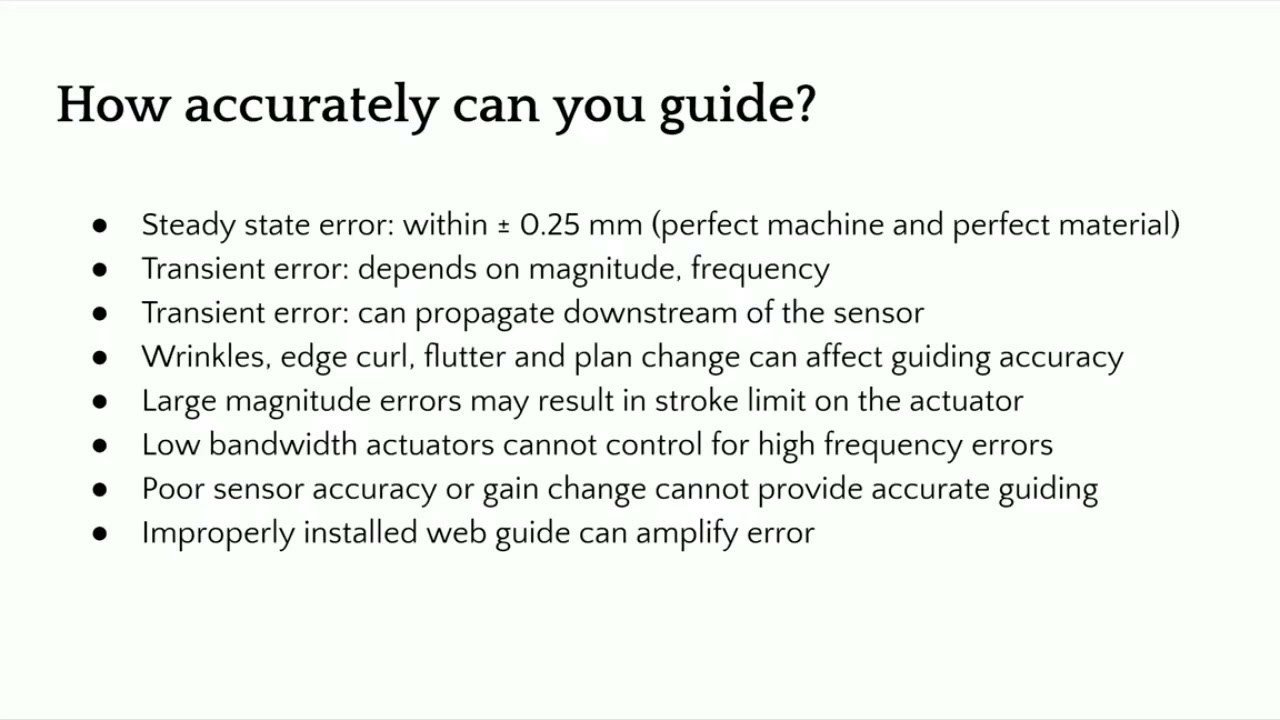
[Music] So the final question here is that you have a web guide and we talked about all these different things. What is the accuracy or how accurately can you guide a web? It actually depends. Like I mentioned, there are lots of different parameters that are going to affect the accuracy of the web guide.
If we are just dealing with a steady state error, we can expect plus or minus 0.25 mm. If you have a good machine in a perfect material, this is what you can expect. Higher accuracies are possible. Like in printed electronics, you can get much higher accuracy.
But if we're dealing with steady state errors, you have a good edge and all those kind of things, this is possible. But the problem is that most web guides are going to come into transient errors. These are either disturbances or material properties that are going to affect the disturbance in the web guide. Now, if you're trying to correct a transient error, it really depends upon what is the magnitude of the error, what is the frequency of the error and so on.
And another important thing that we need to consider is that these transient errors can actually propagate downstream of the sensor and these are called what are called as wave generation. Even though you correct it at the sensor, you don't really know the angle at which the web is approaching and that can cause weaves downstream. You won't have good guiding performance if you have wrinkles. I mean, if the web is wrinkling, that is going to cause the edge to move back and forth.
There's no way you can have good guiding performance with that. Or edge curl, flutter, or sometimes plane change can also have that effect. If you have large magnitude error and your stroke of the actuator is limited or the correction that the webgate can provide is limited then you can expect good grading performance whenever the actuator tops out on either side of its stroke. If you use a lower bandwidth actuator and you have a higher frequency error, you can expect good guiding performances and sensor.
If you don't have a good sensor or if it has gain changes then you can expect a good guiding performance and then improper installation can actually amplify the error. So that's another thing that we can expect. Anyway, so just to summarize the factors affecting we talked about a machine related, process related, material related and the web guide related which is like the stroke deadband actuator backlash correction stroke limit and things like that. So in terms of design requirements uh a good knowledge of the the the conditions like web speed location thickness stiffness environment tension side correction all of these are important for us to have a welldesigned web guide.
If you have a good understanding of all of these, we will do well. [Music]

Explore the essential aspects of actuators in web guiding systems in this episode of our webinar series on Web Guiding Fundamentals. Discover the various types of actuators, including pneumatic, hydraulic, and electromechanical, along with key terminologies such as thrust, correction speed, and backlash. Learn about the significance of actuator sizing, web speed, and the impact of gravitational effects. Ideal for anyone looking to deepen their knowledge on steering guides and actuator functionality in modern web handling systems.
Transcript
Show full transcript (742 words)
[Music] So in terms of actuators, there are lots of terminology that is involved. Some of them are thrust or power, how fast the accelerator is, what is the correction speed, what is the acceleration, stroke length, mounting, what type of coupling we have and things like that. Actuators are pretty standard right now. It's not as important as installation of a web guide or the sensor, but it is an important part of a web guiding system.
The older actuators were either pneumatic or hydraulic. You had an hydraulic pump pumping a double acting cylinder and moving the web guide structure. These were more common in the 50s and up to about maybe '90s before the electronic electromechanical actuators started coming into the market. You could have pneumatic actuators or hydraulic actuators.
The hydraulic actuators have the advantage that it can provide high thrust and can shift large loads quickly. Even now in metals industry, hydraulic actuators are pretty common. You can see them. But the problems are that it's a problem with maintenance.
You need to balance the valves and stuff like that. Change the filters. They could cause leak and this could contaminate your product. And then the precision and accuracy that you can get with an electronic actuator or electric actuator is not something that you can expect in an hydraulic actuator.
So most web guides nowadays are going to use actuators like what these actuators usually have a motor that drives a belt pulley system. There's usually a lead screw, a ball screw or a roller screw that converts the rotary motion into linear motion at the end of the actuator. Some common terminologies that you would see with actuators are maximum current, voltage, power. Whenever we have something with a lead screw or a pitch, that's a common term.
What is the lead of the actuator? Pitch of the actuator. Gearing ratio. Backlash is another thing that you would commonly see with electric actuators, especially with low-end lead screw actuators.
Resolution. What is the smallest movement an actuator can produce? Back drive is a common terminology especially if you're installing a web guide that has to work against gravity. And then types of actuators you have inline and reverse parallel.
Some actuators have limit switches or end stops. And then type of motor used in the actuator. You would commonly see servo stepper brushed or brushless DC motor. So actuators are providing the driving force to the guide structure so that it can position the web.
In terms of thrust, the thrust is the amount of force exerted by the actuator to move the guide structure. And this thrust really depends upon as we saw before mass of the structure that we are trying to move, what is the friction there, how fast you want to move and sometimes gravity as well if you're acting against gravity. In terms of sizing actuators, these are some of the things you need to know to size an actuator properly. a web blind speed mainly because if you have a slow moving web the maximum disturbance frequency you can get depends upon the speed of transport of the web.
If you're moving at 100 ft per minute you might not need a high dynamic response while if you're moving at high speed you might need a much higher dynamic response. The dynamic response is related to the acceleration. Acceleration is related to the thrust. So that's why line speed becomes important.
Guide structure weight and roll weight. If you're trying to move a big mass, we need to know that what type of bearing you're using. So that what is the breakaway force that we need to overcome based on the coefficient of friction of the bearing and then what kind of disturbances we are trying to correct for. There is a correlation between the amount of disturbance that can propagate through a roll-to-roll machine that really depends upon the speed of the web.
The faster you go, higher frequency disturbances can go through. So the web acts as like a low pass filter and then the acceleration and then if you have to look at any gravitational effects. These are some of the key factors that are involved in properly sizing an actuator. But like I said, actuators are pretty straightforward nowadays.
Just need to have some basic questions answered and then we'll be good to go. [Music]
In this episode of the webinar series on web guiding fundamentals, we delve into the critical aspects of steering guides. Learn why it's crucial to maintain a 90-degree angle on the plane of motion to avoid twisting and bending in the web span. Discover the ideal range for raceway angles and the importance of considering web stiffness and entry span length during installation. Proper installation processes are key to minimizing errors and avoiding the common pitfalls that can lead to increased costs and amplified inaccuracies.
Transcript
Show full transcript (467 words)
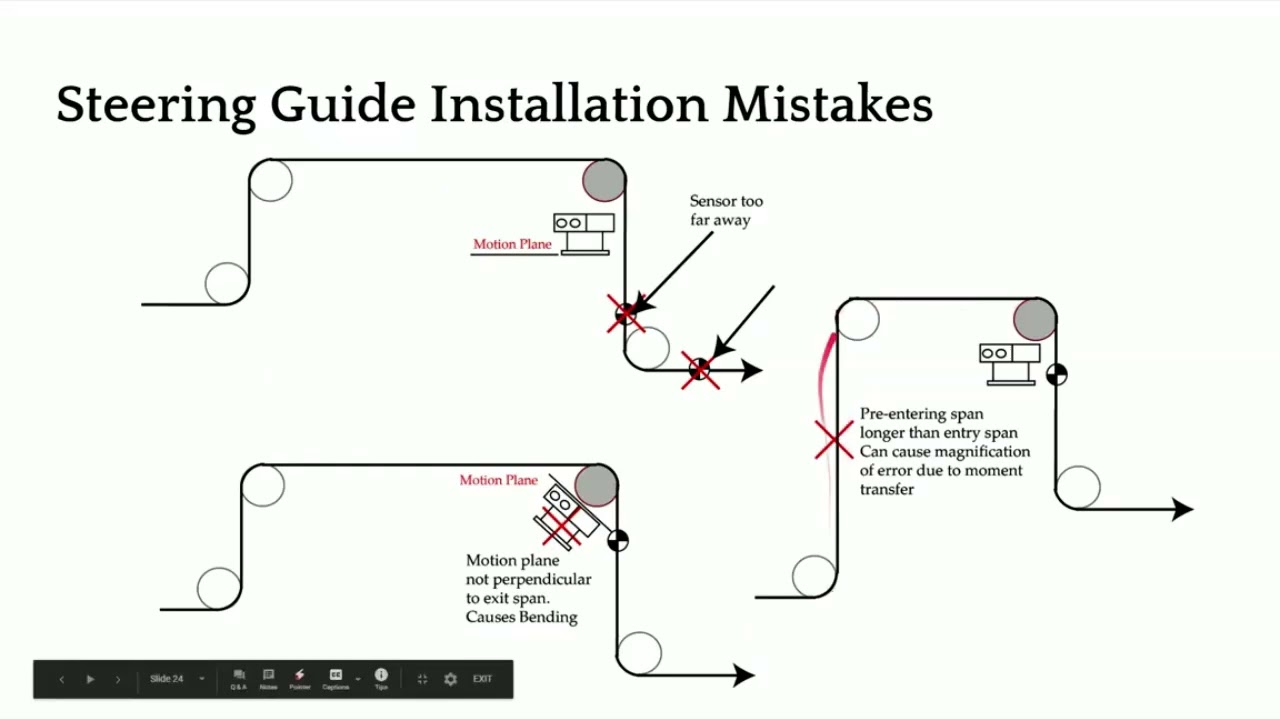
[Music] Now, what not to do? Same thing. We don't want to put the sensor too far away. One of the things that is not really evident is that we don't want to put the plane of motion of the web guide at anything other than 90°.
It's not this angle between the entry and the exit span that needs to be 90°. It's actually the angle of the plane of motion of the web guide and the exit roller. That's what determines whether you're going to have a twisting action or not. When you have something like that, you're going to introduce bending in the span.
And when you start bending a short span, it's not a good sign. So, we don't really want to do that. So, that's the main reason why we need to have the plane of motion perpendicular. Not really the entry and the exit span, but the plane of motion.
And then like I mentioned, if you have the entry span and the pre-entry span longer than the entry span, then you could have moment transfer happening. That's something that you don't want to do either. In terms of wrap angles, pretty simple. You can have something going up like that or going down like that.
As long as we follow this condition, that exit span is perpendicular to the plane motion, then we are in good shape. Just to summarize the design consideration, design correction is one of the main things there. And the raceways that we have on the steering guides, we don't want to angle them more than 25°. So anywhere between 5 to 20° would be the ideal one.
In terms of installation, steering guide is a lot more complicated to install. You have to consider the stiffness of the web, the entry span length. You need to make sure that you're not putting too much bending stress on the web based on how stiff your web is, the location of the instance center, which depends upon the raceway angle, depends upon the length of the entry span. So, there are lots of things to consider for proper installation of a steering guide.
These web guides are prone to have a lot of issues because they're not properly installed. In terms of advantages, they're they're simple, so they're cost effective. It's just a single roller. So, it's inexpensive, but it comes with other things that increase the overall cost of ownership.
It's hard to install. A lot of attention to detail is required, especially because of the bending and things like that. Loss of traction or anything like a moment transfer occurring can actually amplify the error. So, a poorly installed or poorly designed steering guide can actually produce error, more amplify the error than than what it's intended to do.
[Music]

This video, part of the Web Guiding Fundamentals webinar series, focuses on the proper installation techniques for web guiding systems. It covers essential elements such as maintaining a 90-degree wrap at the entry and exit of rollers, recommended span lengths, and the ideal positioning of sensors for optimal control and stability. Key considerations include sensor placement within the first half of the exit span, ensuring the plane of motion of the carriage is perpendicular to the spans, and the implications of bending and steering effects on web stability.
Transcript
Show full transcript (585 words)
[Music] So in terms of installation, we want to make sure that we have a 90° wrap at the entry and exit of the roller. And then there are considerations on the span length at the entry and exit. Usually you can get away with half a web width. We recommend about one to two web widths if possible.
If you have a stiffer web like metals, you might need a longer entry and exit span. We want to locate the sensor as close as possible. This is true for any web guide. It doesn't matter if it's a displacement guide, unwind guide, rewind guide, any web guide.
We want to have the sensor as close as possible hitting the span where the guiding action takes place. The recommendation is to be within the first half of the exit span. And then how long this span really depends upon how much correction you're looking for. Typically these carriages are allowed to pivot only about 5 to 10°.
If you want larger correction then you can make these fans longer. The main thing is that you need to make sure that the plane of motion of the carriage is perpendicular to the entry and exit span so that you can create a pure twist on these spans. And then as long as these rollers are moving in tandem or parallel to each other, then you will have the desired effect. They don't have to be on the same carriage.
They can be on different carriages as long as we are able to move them parallel to each other. You can even have a process here. You don't really have to have just two rollers. You can have multiple rollers.
So, it provides a lot of flexibility here. The guiding action is actually happening in the exit span. We don't want to install the sensor too far away or in the next span. This is mainly for control system purposes.
and stability. When the web guide makes a corrective action, that action is not seen at the sensor immediately. So, if you're running really fast, you might get away with moving these sensors a little farther down. But if you're running slow, whenever this web guide moves here, you would see that motion if the sensor is as close to the exit roller as possible.
If you install it here or here, especially when the web stops and there is a small error, the web guide would keep moving and that might cause the web to break or have unintended consequences. So, we don't want to have the sensor farther away or in an expand. And we don't even we don't also want to have a scenario where you have an angle that is not 90°. If you have a 90° wrap, you have twist.
As soon as you introduce something which is deviating more from the 90° you start creating bending in the web. So these kind of bending is going to act as under steering the web. It's going to cause bending that's going to under steer the web and it also causes distortions and guide instability. So we don't really want to have any of these conditions.
On the contrary, if you have a span exit span that is spread out like this, this is going to over steer the web, it's the bending effect that is causing that. And we really don't want to do that. So, ideal scenario would be to have a 90° wrap in and out. [Music]
Displacement Web Guides: Principles and Applications
In this episode of the webinar series 'Web Guiding Fundamentals,' we delve into the intricacies of displacement web guides, a widely used and recommended solution for web guiding applications. Learn how these guides work without bending the web, their design principles, and why they are considered 'perfect web guides' with a one-to-one ratio of movement. Discover the importance of entry and exit roller alignment, and understand the difference between displacement and offset pivot guides.
Transcript
Show full transcript (343 words)
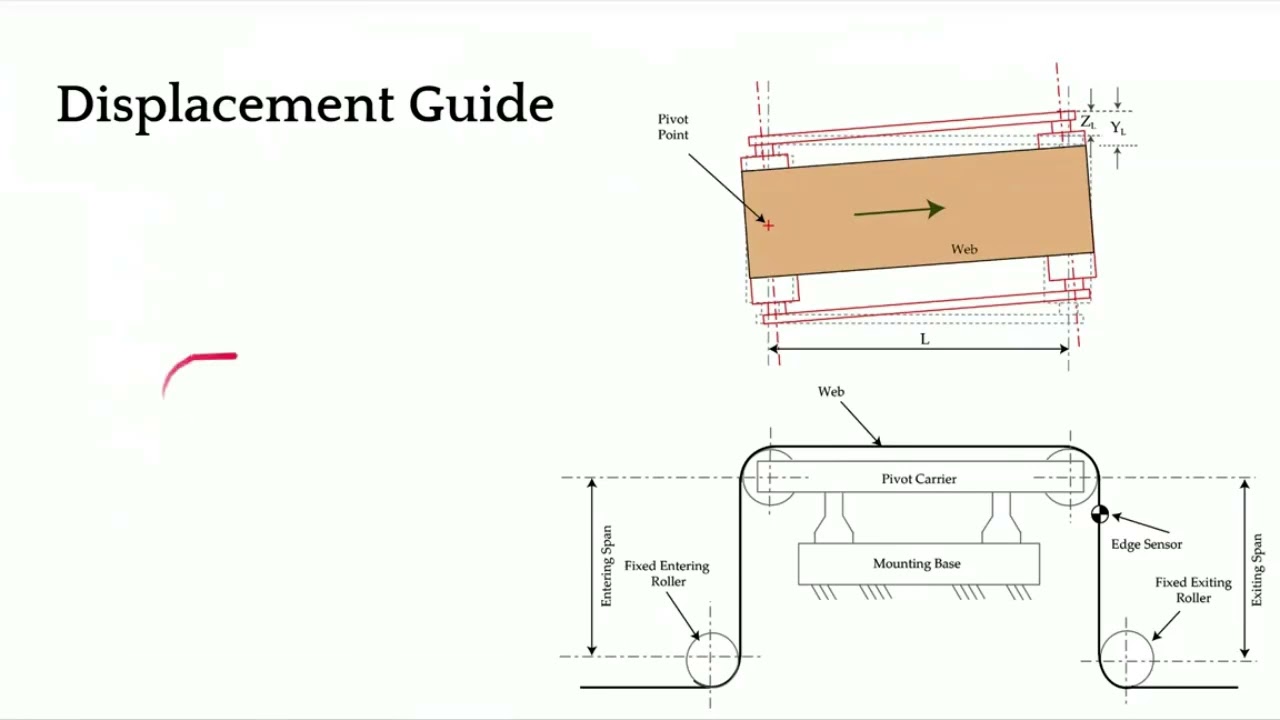
Now moving over to intermediate web guides, we have a displacement web guide. This is another type of one of the most commonly used web guide that you're going to see and we would recommend this as the first choice for any web guiding application. One of the main reasons for that is it actually displaces the web. And in this web guide, it's not bending the web.
The reason why it's not bending the web is you have this entry span and a 90° wrap. And then you have the plane of the carriage right here. When this carriage pivots, the pivot point is shown here, but that's a mistake. It should have been right at the edge of right here.
So when this carriage rotates, pivots about the pivot point at this point right there, these two rollers are actually moving in tandem. So there's no bending in this region. In these fans, since they are perpendicular, that motion is a pure twist. So really there is no bending in this kind of a web guide.
If the web guide is designed properly, then these web guides can have one one ratio in the sense that if you move the web guide one unit, then the web will actually move one unit. That's why we call them a perfect web guide. I do see a question here that says, would you agree that an offset pivot guide acts on a different principle other than normal entry? That is correct.
Because these two rollers are parallel to each other. There is no bending in the span. The entry and the exit rollers are perpendicular or the wrap angle are perpendicular. This span is perpendicular to the plane of motion of the web guide.
They are going to be in twist. So there's no bending. And when there's no bending, there's no normal entry coming into picture there. The twist is an important design part.
And this would be our first choice for us in terms of applying it in any webg guiding situation.
Join us in this informative episode of our 'Web Guiding Fundamentals' webinar as we delve into the intricacies of guides structures of terminal web guides, otherwise known as unwind and rewind web guides. Learn about the various components, including the role of actuators and sensors, the design considerations for mechanical rigidity, and the importance of actuator sizing. Gain insights into the differences between guiding and chasing the web, and understand the advantages and disadvantages of these systems.
Transcript
Show full transcript (976 words)
So let's dive into detail about different components of the web guide. First we'll start off with guide structures and look at how guide structures are with different types of web guides that we saw. So first and foremost we have the unwind web guide structure. In this case you have a parent roll feeding the web into your machine.
This role is on a shifting stand or a base supported by linear bearings. An actuator connects the moving stand with the fixed base and then there's a sensor here that is looking at the position of the web. The main objective of an unwind web guide is to ensure that the web fed into the process is at the desired location. Because of that, you have a sensor fixed to a machine frame actually moves in and out of the monitor.
It's going to go in and out. And the feedback from the sensor is used to make this unwind guide move in and out so that it can position at the right location. One thing I wanted to point out is that there is a shifting idler. When I say shifting idler, it means that this idler is attached to this moving base.
The main reason why we do that is that if we put a sensor right here, it is not an ideal location just because of the fact that when the diameter of this roller changes, you're going to have the web plane go in and out. And if that happens, that's going to affect your guiding. Typically, you would see a shifting idler. It doesn't have to be one.
It can be multiple. It could also be a whole frame with a lot of rollers. We need to put the sensor just downstream of the last shifting idler and the sensor is fixed to the machine frame so we can guide the web. So those are the main things with an unwind guide.
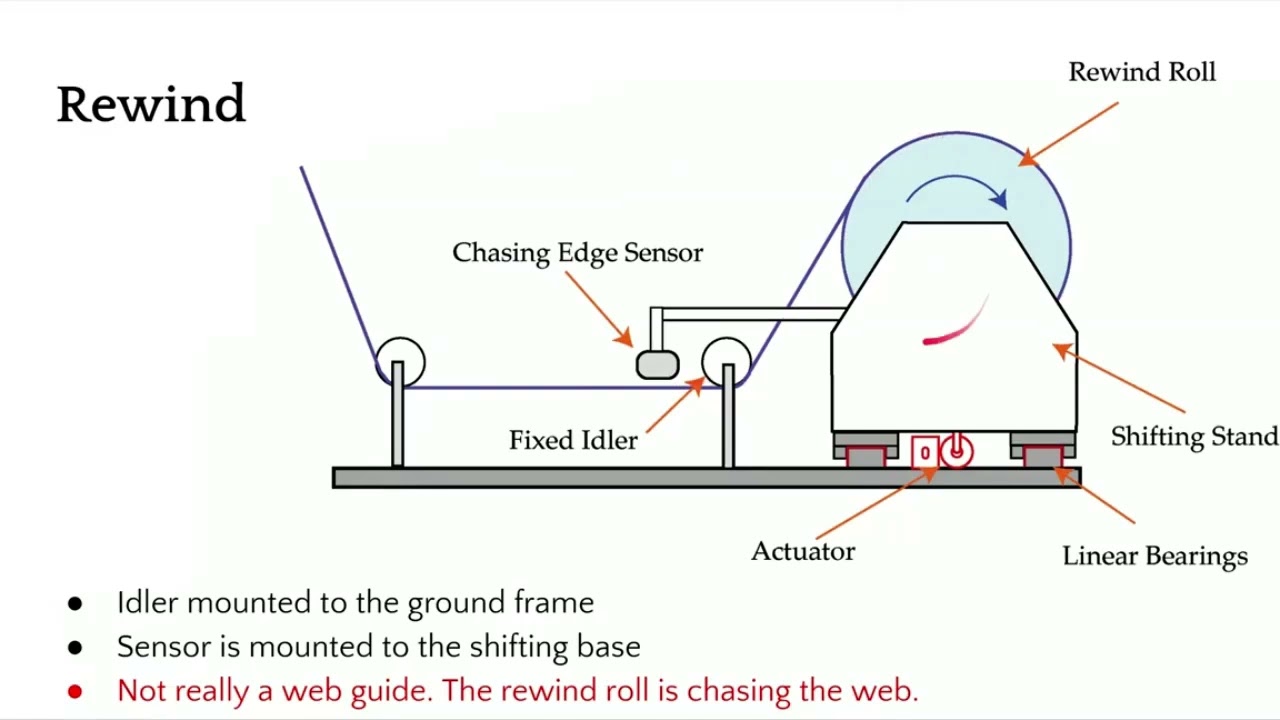
Now when we look at rewind guide rewind even though we call it as a guiding it's not actually guiding the web it's chasing the web. The main thing unique about this is that in a rewind system you have a sensor attached to the rewind frame. All of the things in terms of the carriage it's exactly the same. You have a sensor that is attached to the rewind stand so that when the rewind moves, the sensor also moves and then you have a fixed idler.
Rewind is not really guiding the web. It's actually chasing the web. And the main reason why we do that is that we need to maintain the relative position of the web and the rewind roll. If we put the sensor on a fixed frame and look at this rewind roll, then we would not know the relative position between those two.
That's the main reason why we attach this sensor onto the moving rewind stand gives us indirectly the position of the rewind stand. And the objective is to make sure that we move the rewind stand so that the middle of the sensor or the guide point of the sensor matches the location of the web. Like I mentioned, it's not really guiding the web. We are chasing the web so that the rewind roll would be at the right location to get the web bound properly.
So just to summarize about these two terminal guides, we can look at what are the things that we need to have a good rewind or unwind guiding system. First of all, in terms of design, we need to make sure that the mechanical structure and rigidity and stiffness are designed properly. We are moving a big mass and depending upon the type of web may be metals it may be thousands of pounds multiple thousands of pounds that we are trying to move and we need to make sure that the structure is rigid enough so that we can avoid any mechanical resonance the natural frequency of the structure should be at least 3 to four times the operating frequency of the control system. The other thing we need to consider especially with these kind of guides is that we need to size the actuator properly.
When we talk about sizing the actuator what we are talking about is it should have enough thrust so that it can push the mass. It has enough thrust to overcome the static friction and provide the desired acceleration to reject the disturbances or errors that may be there. Just like the mechanical structure rigidity, we need to also make sure that the actuator coupling and the actuator stiffness are all accounted for. Any play in the actuator coupling is going to reduce the stiffness of the overall system.
That's going to destabilize your system. In terms of installation consideration, the main thing that we want to look for in these type of guides is the location of the sensor with respect to the moving stand. Either it's fixed to the machine frame or it's moving with the carriage. That's the main thing.
These web guides are simple. That's one of the advantages of these web guides. And these web guides really do not have to take advantage of the normal entry roll because all the rollers are parallel to each other. So there's not going to be any misalignment in them.
So there's going to be less amount of stresses on the web. The disadvantages with these kind of web guides. Well, first of all, you need a high thrust actuator, especially when you have larger mass to move and it's not cost effective. If you really want good performance from a web guide, if you want to reject a high frequency disturbance, then this may not be a good choice for us.
[Music]

Normal Entry Rule for Webs: Essential Principles Explained
Dive into the fundamental 'Normal Entry' rule for webs traveling over rollers in this episode of 'Web Guiding Fundamentals.' Understand how a web always aligns itself perpendicular to the axis of a roller's rotation, even in cases of misalignment. Learn about the beam-like behavior of the web, the dynamics of its movement, and the importance of these principles for successful web guiding applications.
Transcript
Show full transcript (322 words)
[Music] Normal entry is a web approaching a roller will always align itself perpendicular to the axis of rotation of the roller. As you see in this video right here, let me restart that. As soon as the roller on the left has a misalignment, the web started to track and move in such a way that it will approach the roller on the left perpendicular to the axis of the rotation. This is the fundamental principle used in most of the intermediate web guides that we're going to see.
What's happening here is that the web is essentially behaving like a beam and the angular displacement on this left hand side is bending the beam and it's causing the beam to bend and that's what is causing the web to track to this side. There are lots of dynamics involved in this process. how fast the web moves, how much does it move, all of those depends upon the transport conditions, the what type of web it is, what kind of traction you have and things like that. And obviously the static behavior is that um at steady state once this angle is set, how much is it going to move?
Are we going to see any movement on this side? As you can notice when this web moved the upstream roller, the web was still there. It was maintaining there because it was able to have enough traction so that the lateral forces or the moment that is acting there was not able to make the web move. And whenever we have a motion like this, bending occurs, bending in term means that there are stresses developed in the web.
So you're going to have a tight side and a slack side and they're going to be a tension profile here. So these are important to understand for a successful webg guiding application or execution of a web guide. [Music]
Understanding the Key Components of a Basic Web Guide System
In this episode, we delve into the essential elements of a basic web guide system. We explore the four main components: the guide structure or mechanism, the actuator, the sensor, and the controller. Learn how each component plays a crucial role in ensuring precise web positioning, from making physical contact with the web to providing feedback and executing corrective actions in a closed-loop feedback control system.
Transcript
Show full transcript (296 words)
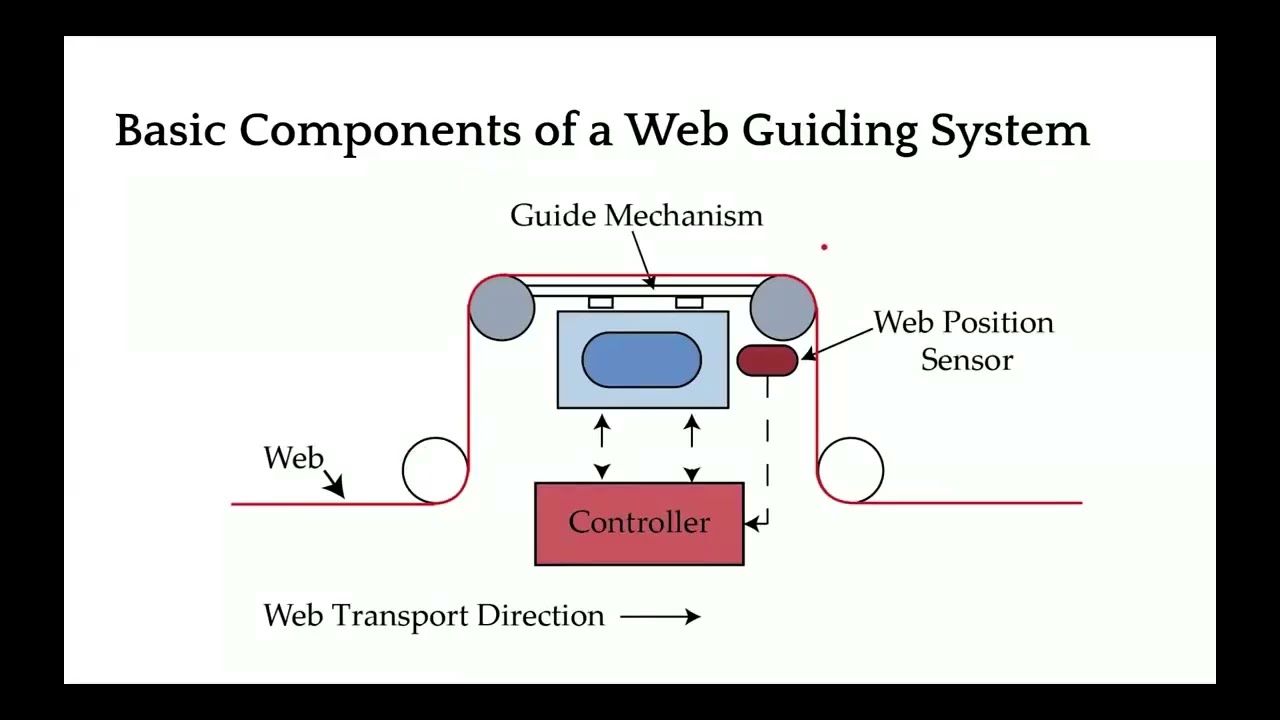
In terms of a basic web guiding system, we are mainly dealing with four main items apart from the web. One is the guide structure or mechanism. This is the device that is actually making contact with the web and that's the one that is need to be moved or it moves the web. There are different types of guide structures that we will go through.
The other component of a web guiding system is an actuator. So actuator is something that takes an electrical signal and converts that into physical motion so that it moves the guide structure so that the web can be located at the desired location. The third and one of the most important components of a web guiding system is a sensor. The sensor is the device that provides the feedback.
The sensor is the one that tells us where the web is inferring the position and then that signal is sent to a controller. The controller is mainly the intelligence or the brains that takes that sensor signal and computes the corrective action required. So the actuator can move the guide mechanism to the the location where we can get the desired web position. Again, another schematic of how the components of the web guides are.
Web is a part of the web guiding system. And then you have the mechanism. There's an actuator inside the mechanism. The sensor gets the position feedback of where the web is, sends that information to the controller.
controller then computes an error and it sends the command to the actuator so that the mechanism can be moved to position the web at the right location. This is a closed loop feedback control system that is a main part of a web guiding system.
This video delves into the necessity of web guiding, covering key reasons such as material imperfections, machine variations, tension control issues, and operator errors. It explains the significance of web guides at different machine locations, differentiating between intermediate and terminal guides, and uses lamination as an example to illustrate the need for precise web alignment. Join us as we explore why and where web guides are essential in the roll-to-roll process.
Transcript
Show full transcript (519 words)
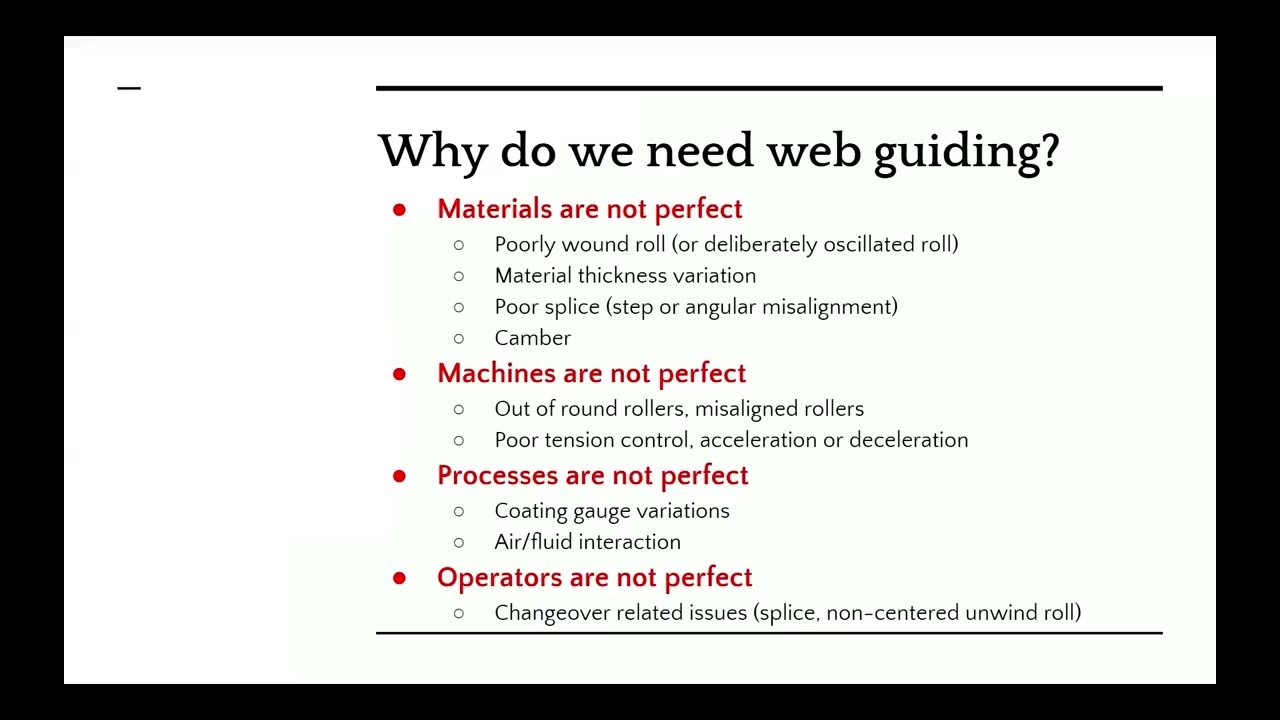
[Music] So why do we need web guiding? Well, there are mainly four reasons why we need web guiding. First and foremost is that materials are not perfect. You might have a poorly wound roll that is not wound properly or deliberately wound roll with an oscillation on it.
And when you are trying to feed it into your rollto-roll machine, you need to guide it so that it aligns with your process. Some materials may have thickness variation like gauge band variation either during coating or forming processes especially with paper mills. Different gauge papers may track or slide differently. Splices when joining two rolls of web might be a step change or an angular misalignment.
Some materials have a natural curvature called camber. So when the materials are not perfect, that's going to have the web nist track in your machine. It could also be due to machine itself. So either you have machines with out of round rollers like a crown concave or a convexed roller.
Whenever you have a variation in the diameter of the roller, that's a problem. Or the rollers are not aligned properly with respect to each other. That could also cause the webs to misrack. You might also have tension control issues.
If you don't have enough tension, you don't have traction, then that's going to be an issue. Whenever you have acceleration or deceleration, that might also cause the web to misrack. It could also be due to processes. For example, if you have a coding process and you have uneven coding across the width of the web, that's going to cause issues with tracking.
And also some processes where you could have air intrained between the web and the roller that would cause the web to lose fraction and mistract. That could also be an issue. That's why we need web guiding. Finally, operators mainly when they are splicing the web or when they are putting a new parent roll into their roll-to-roll machine, they may not center it or put it at the right location.
That might also cause an issue and might need web guiding. So web guides are necessary at different locations of the machine because you might need alignment at different parts of the machine. That's the main thing with web guiding. You have to put a web guide in front of any process that requires web alignment.
Just to give you an example, let's say you are laminating something and you have two layers of web coming in to this lamination process. At this point you would need a web guide so that you can align this layer and this layer with respect to each other. The guides that are used within the machine are called intermediate guides or they are intermediate to the machine and the guides that are used at the entry and exit of the machines are called as terminal guides. So we're going to look at all of these in detail but that gives you an idea of why we need web guides and where we need web guides.
[Music]