Join us in this informative episode of our 'Web Guiding Fundamentals' webinar as we delve into the intricacies of guides structures of terminal web guides, otherwise known as unwind and rewind web guides. Learn about the various components, including the role of actuators and sensors, the design considerations for mechanical rigidity, and the importance of actuator sizing. Gain insights into the differences between guiding and chasing the web, and understand the advantages and disadvantages of these systems.
Transcript
Show full transcript (976 words)
So let's dive into detail about different components of the web guide. First we'll start off with guide structures and look at how guide structures are with different types of web guides that we saw. So first and foremost we have the unwind web guide structure. In this case you have a parent roll feeding the web into your machine.
This role is on a shifting stand or a base supported by linear bearings. An actuator connects the moving stand with the fixed base and then there's a sensor here that is looking at the position of the web. The main objective of an unwind web guide is to ensure that the web fed into the process is at the desired location. Because of that, you have a sensor fixed to a machine frame actually moves in and out of the monitor.
It's going to go in and out. And the feedback from the sensor is used to make this unwind guide move in and out so that it can position at the right location. One thing I wanted to point out is that there is a shifting idler. When I say shifting idler, it means that this idler is attached to this moving base.
The main reason why we do that is that if we put a sensor right here, it is not an ideal location just because of the fact that when the diameter of this roller changes, you're going to have the web plane go in and out. And if that happens, that's going to affect your guiding. Typically, you would see a shifting idler. It doesn't have to be one.
It can be multiple. It could also be a whole frame with a lot of rollers. We need to put the sensor just downstream of the last shifting idler and the sensor is fixed to the machine frame so we can guide the web. So those are the main things with an unwind guide.
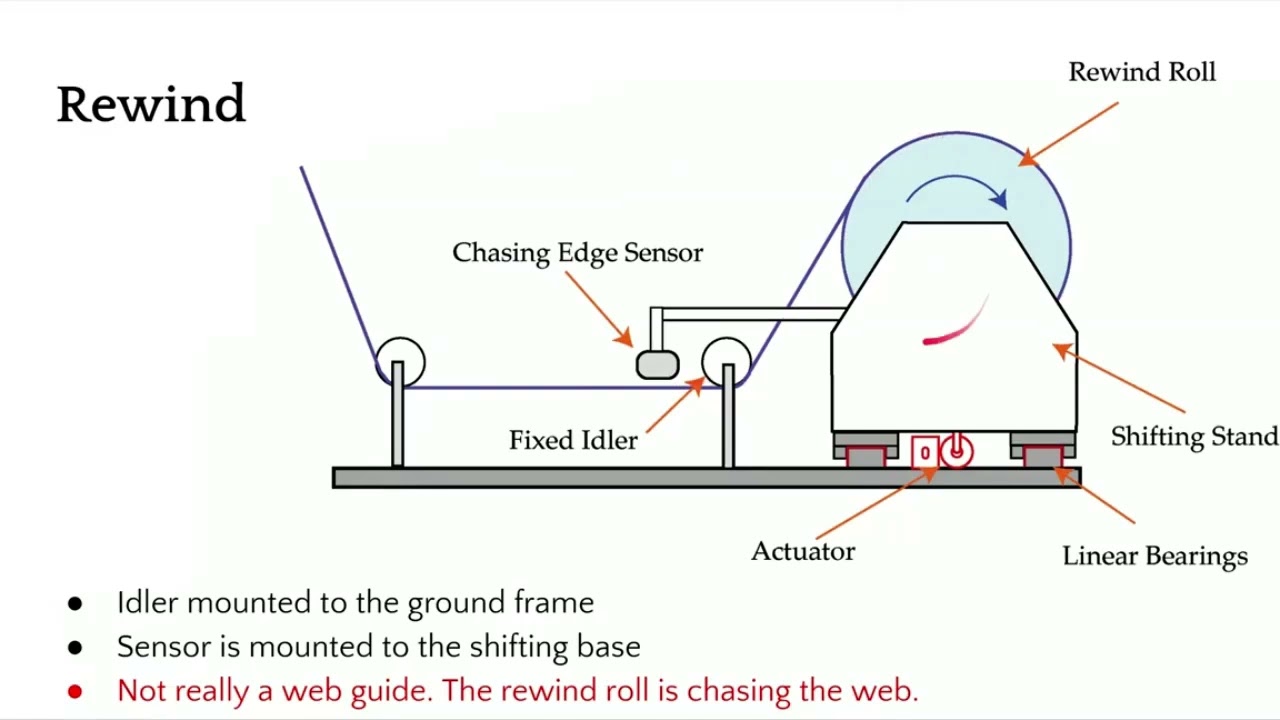
Now when we look at rewind guide rewind even though we call it as a guiding it's not actually guiding the web it's chasing the web. The main thing unique about this is that in a rewind system you have a sensor attached to the rewind frame. All of the things in terms of the carriage it's exactly the same. You have a sensor that is attached to the rewind stand so that when the rewind moves, the sensor also moves and then you have a fixed idler.
Rewind is not really guiding the web. It's actually chasing the web. And the main reason why we do that is that we need to maintain the relative position of the web and the rewind roll. If we put the sensor on a fixed frame and look at this rewind roll, then we would not know the relative position between those two.
That's the main reason why we attach this sensor onto the moving rewind stand gives us indirectly the position of the rewind stand. And the objective is to make sure that we move the rewind stand so that the middle of the sensor or the guide point of the sensor matches the location of the web. Like I mentioned, it's not really guiding the web. We are chasing the web so that the rewind roll would be at the right location to get the web bound properly.
So just to summarize about these two terminal guides, we can look at what are the things that we need to have a good rewind or unwind guiding system. First of all, in terms of design, we need to make sure that the mechanical structure and rigidity and stiffness are designed properly. We are moving a big mass and depending upon the type of web may be metals it may be thousands of pounds multiple thousands of pounds that we are trying to move and we need to make sure that the structure is rigid enough so that we can avoid any mechanical resonance the natural frequency of the structure should be at least 3 to four times the operating frequency of the control system. The other thing we need to consider especially with these kind of guides is that we need to size the actuator properly.
When we talk about sizing the actuator what we are talking about is it should have enough thrust so that it can push the mass. It has enough thrust to overcome the static friction and provide the desired acceleration to reject the disturbances or errors that may be there. Just like the mechanical structure rigidity, we need to also make sure that the actuator coupling and the actuator stiffness are all accounted for. Any play in the actuator coupling is going to reduce the stiffness of the overall system.
That's going to destabilize your system. In terms of installation consideration, the main thing that we want to look for in these type of guides is the location of the sensor with respect to the moving stand. Either it's fixed to the machine frame or it's moving with the carriage. That's the main thing.
These web guides are simple. That's one of the advantages of these web guides. And these web guides really do not have to take advantage of the normal entry roll because all the rollers are parallel to each other. So there's not going to be any misalignment in them.
So there's going to be less amount of stresses on the web. The disadvantages with these kind of web guides. Well, first of all, you need a high thrust actuator, especially when you have larger mass to move and it's not cost effective. If you really want good performance from a web guide, if you want to reject a high frequency disturbance, then this may not be a good choice for us.
[Music]
Understanding the Key Components of a Basic Web Guide System
In this episode, we delve into the essential elements of a basic web guide system. We explore the four main components: the guide structure or mechanism, the actuator, the sensor, and the controller. Learn how each component plays a crucial role in ensuring precise web positioning, from making physical contact with the web to providing feedback and executing corrective actions in a closed-loop feedback control system.
Transcript
Show full transcript (296 words)
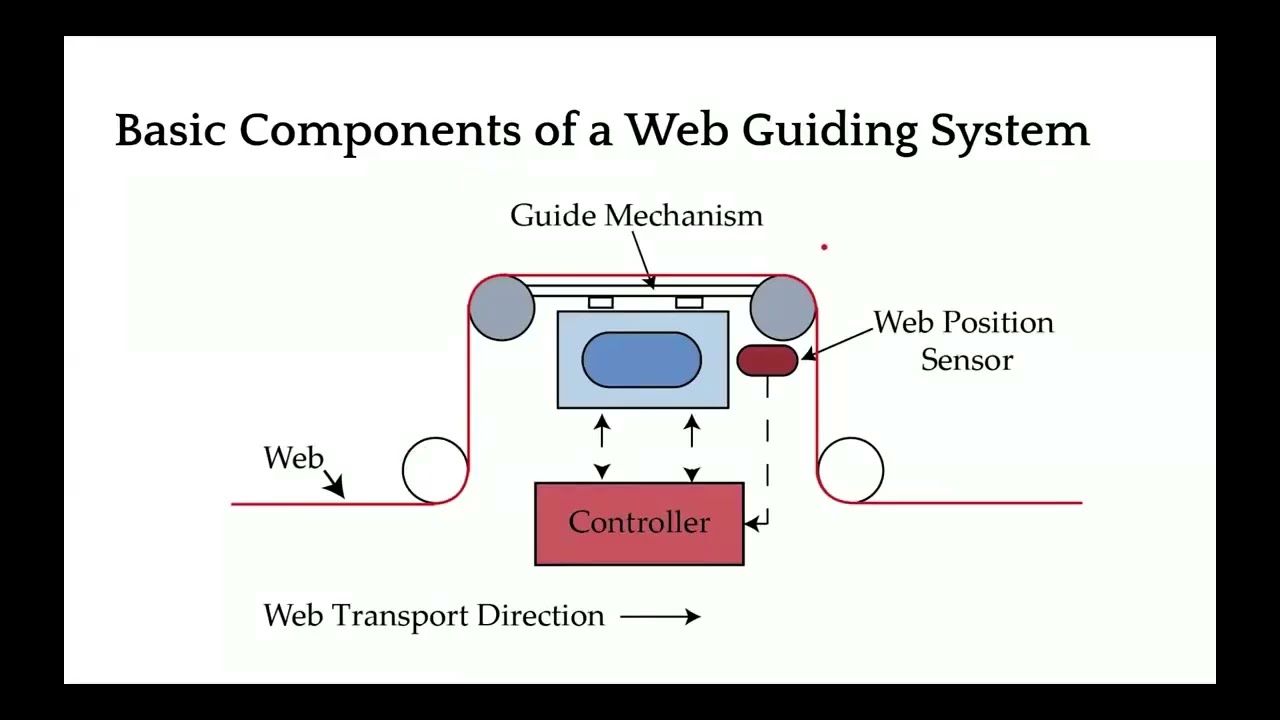
In terms of a basic web guiding system, we are mainly dealing with four main items apart from the web. One is the guide structure or mechanism. This is the device that is actually making contact with the web and that's the one that is need to be moved or it moves the web. There are different types of guide structures that we will go through.
The other component of a web guiding system is an actuator. So actuator is something that takes an electrical signal and converts that into physical motion so that it moves the guide structure so that the web can be located at the desired location. The third and one of the most important components of a web guiding system is a sensor. The sensor is the device that provides the feedback.
The sensor is the one that tells us where the web is inferring the position and then that signal is sent to a controller. The controller is mainly the intelligence or the brains that takes that sensor signal and computes the corrective action required. So the actuator can move the guide mechanism to the the location where we can get the desired web position. Again, another schematic of how the components of the web guides are.
Web is a part of the web guiding system. And then you have the mechanism. There's an actuator inside the mechanism. The sensor gets the position feedback of where the web is, sends that information to the controller.
controller then computes an error and it sends the command to the actuator so that the mechanism can be moved to position the web at the right location. This is a closed loop feedback control system that is a main part of a web guiding system.
This video delves into the necessity of web guiding, covering key reasons such as material imperfections, machine variations, tension control issues, and operator errors. It explains the significance of web guides at different machine locations, differentiating between intermediate and terminal guides, and uses lamination as an example to illustrate the need for precise web alignment. Join us as we explore why and where web guides are essential in the roll-to-roll process.
Transcript
Show full transcript (519 words)
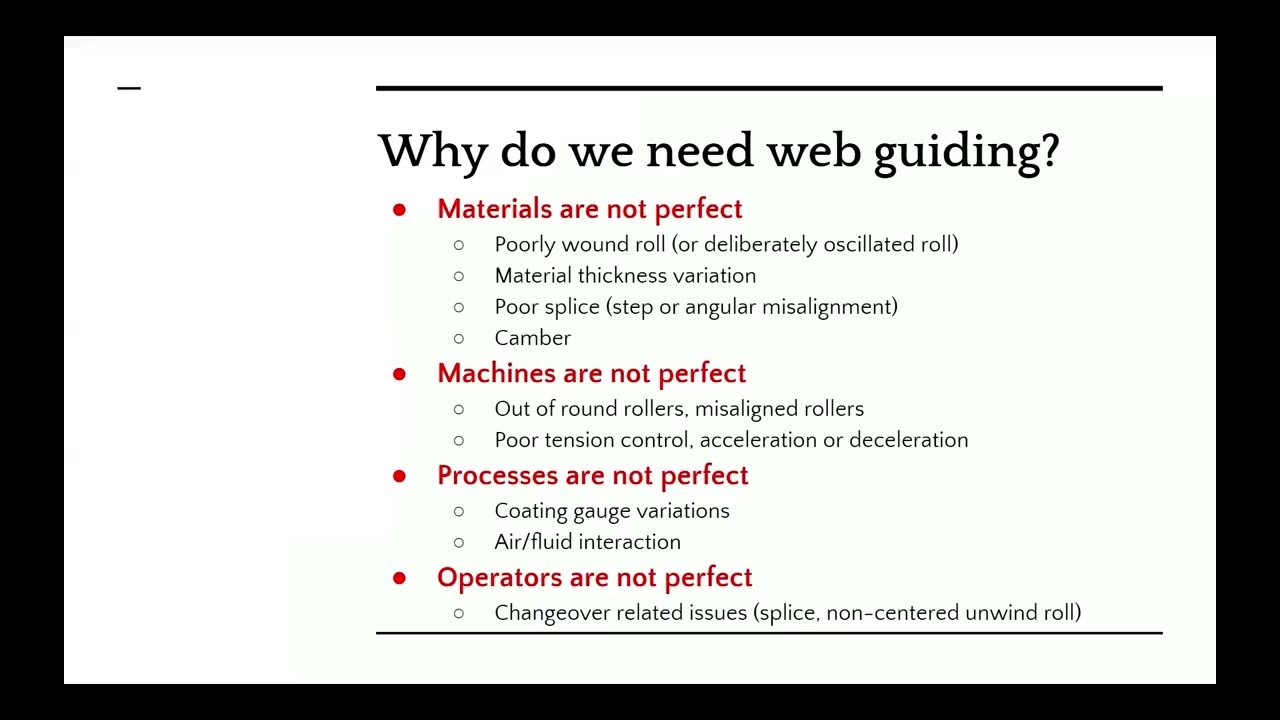
[Music] So why do we need web guiding? Well, there are mainly four reasons why we need web guiding. First and foremost is that materials are not perfect. You might have a poorly wound roll that is not wound properly or deliberately wound roll with an oscillation on it.
And when you are trying to feed it into your rollto-roll machine, you need to guide it so that it aligns with your process. Some materials may have thickness variation like gauge band variation either during coating or forming processes especially with paper mills. Different gauge papers may track or slide differently. Splices when joining two rolls of web might be a step change or an angular misalignment.
Some materials have a natural curvature called camber. So when the materials are not perfect, that's going to have the web nist track in your machine. It could also be due to machine itself. So either you have machines with out of round rollers like a crown concave or a convexed roller.
Whenever you have a variation in the diameter of the roller, that's a problem. Or the rollers are not aligned properly with respect to each other. That could also cause the webs to misrack. You might also have tension control issues.
If you don't have enough tension, you don't have traction, then that's going to be an issue. Whenever you have acceleration or deceleration, that might also cause the web to misrack. It could also be due to processes. For example, if you have a coding process and you have uneven coding across the width of the web, that's going to cause issues with tracking.
And also some processes where you could have air intrained between the web and the roller that would cause the web to lose fraction and mistract. That could also be an issue. That's why we need web guiding. Finally, operators mainly when they are splicing the web or when they are putting a new parent roll into their roll-to-roll machine, they may not center it or put it at the right location.
That might also cause an issue and might need web guiding. So web guides are necessary at different locations of the machine because you might need alignment at different parts of the machine. That's the main thing with web guiding. You have to put a web guide in front of any process that requires web alignment.
Just to give you an example, let's say you are laminating something and you have two layers of web coming in to this lamination process. At this point you would need a web guide so that you can align this layer and this layer with respect to each other. The guides that are used within the machine are called intermediate guides or they are intermediate to the machine and the guides that are used at the entry and exit of the machines are called as terminal guides. So we're going to look at all of these in detail but that gives you an idea of why we need web guides and where we need web guides.
[Music]
What are Terminal Web Guides?
Terminal web guides are devices used at the entry and exit of a roll-to-roll machine to appropriately align the web to the desired cross machine location. Entire roll of the web, on the unwind/rewind stand, is moved along the cross-machine direction for the proper alignment.