In this episode of our webinar series on web guiding fundamentals, we explore the installation and operational intricacies of a steering guide. We cover the mechanics of a single roller installed on angled raceways, its bending action, and essential guidelines for entry and exit spans. We discuss the importance of maintaining a 90-degree exit span angle to minimize stress and prevent issues such as wrinkles and web tear.
Transcript
Show full transcript (631 words)
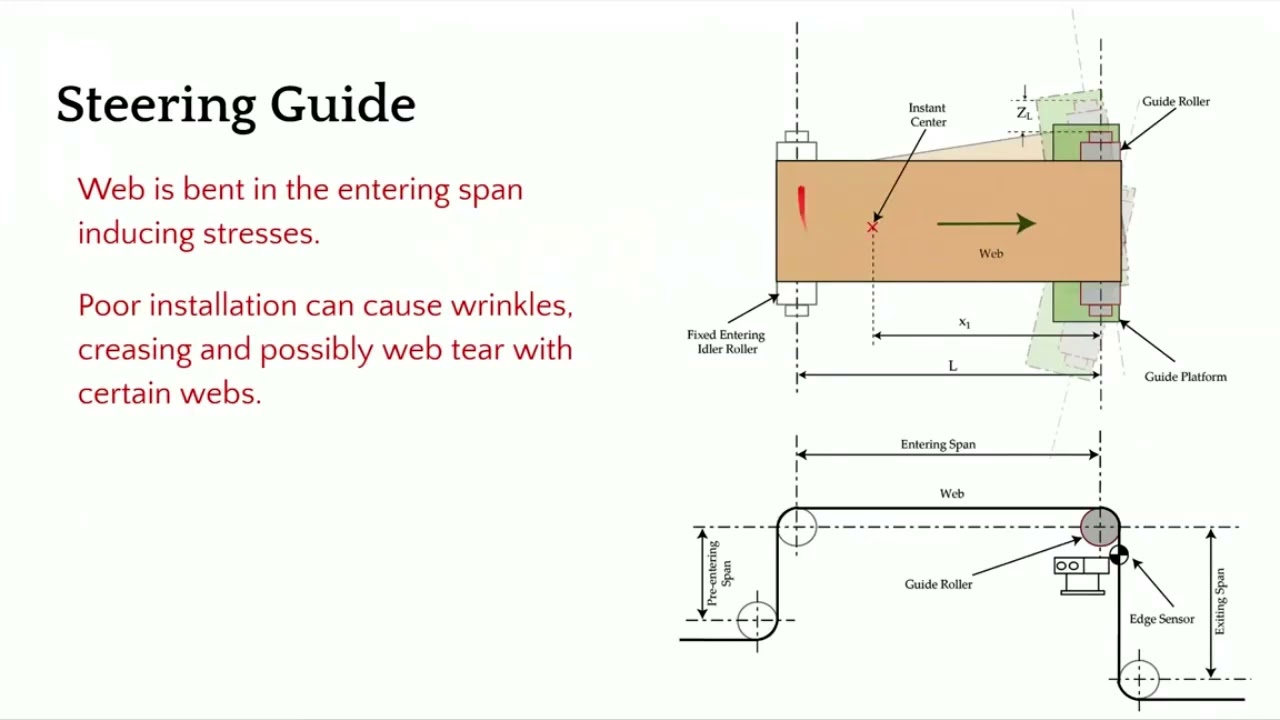
[Music] The second choice for us would be a steering guide. In terms of how it works, it's a little bit different. You got a single roller. This is the top view and this is the side view.
This roller is installed on two raceways at an angle. The web guide forms an arc like that. It moves and forms an arc back and forth. That's how we are changing the axis of rotation.
In this web guide, we are creating a bending. So there is a bending action here. It's displacing as well as bending. In terms of the entry and the exit span, there are some guidelines for that as well and we'll go through that.
This is not an ideal choice for us because it's bending. So it's introducing stress. If it's not installed properly, it can cause wrinkles, creasing, web tear, and edge stresses. In terms of installation, what do we need to look for?
We need to make sure that the exit span is perpendicular to the plane of motion of the web guide. The main thing is to make sure that the exit span is in pure twist. This allows us to have the least amount of stress in the web. So we want to do that.
Now the entry and exit span length is also depending upon the stiffness of the web. You typically need a longer entry span for a rewind guide because the motion of the web guide or the displacement of the web happens because of bending. So you have to follow those guidelines in terms of if you have a stiffer web, you need to have a longer span so that you can allow the bending to happen. Normally it's about 1 to five times the width of the web.
And then the exit span can be half a web width. And there's also minimum formula for finding out the minimum span length. In terms of other things here, let me talk a little bit about the instance center. Like I mentioned, there is a raceway, two raceways here, and they are angled so that you can have the web guide go around an arc.
And the center of the arc is called the instant center. This is important. We need to make sure that the instant center is within this span. and it's at a certain distance about half the length of the span or up to 2/3 the length of the span.
These are all numbers coming from the dynamic model of the web guide and the dynamics of the web itself. If you don't follow those conditions, then you can have a web guide over steering, under steering, creating an awful lot of stresses, maybe wrinkles, slack edges, tight edges and all those kind of things. The main things that we want to look for is this angle. Make sure that it's 90° and then you have an entry span that is pretty long.
You can have different wrap here. We don't want to go more than 45° on either side. When you do that, you're adding twisting. Uh so whenever it goes away from this 90°, it's not pure bending.
There is bending and twisting in mold there. And then we want to have an angle here because when you put bending stresses here, you have the possibility of what we call as moment transfer. So the motion of this roller can actually move the web upstream of the guide roller. In order to avoid that, we want to have certain conditions here.
And we also want this span shorter so that it becomes harder for that moment transfer to occur. Those are some of the guidelines for installation of a steering guide and again sensor as close as possible. [Music]
In this webinar episode on web guiding fundamentals, we delve into the accuracy of web guides, discussing various factors that affect their performance. We explore how steady state and transient errors can influence guiding accuracy and highlight the importance of machine quality, material properties, and proper installation. Additionally, we cover the design requirements necessary for achieving optimal web guide performance, emphasizing the need to understand conditions like web speed, thickness, and tension.
Transcript
Show full transcript (491 words)
[Music] So the final question here is that you have a web guide and we talked about all these different things. What is the accuracy or how accurately can you guide a web? It actually depends. Like I mentioned, there are lots of different parameters that are going to affect the accuracy of the web guide.
If we are just dealing with a steady state error, we can expect plus or minus 0.25 mm. If you have a good machine in a perfect material, this is what you can expect. Higher accuracies are possible. Like in printed electronics, you can get much higher accuracy.
But if we're dealing with steady state errors, you have a good edge and all those kind of things, this is possible. But the problem is that most web guides are going to come into transient errors. These are either disturbances or material properties that are going to affect the disturbance in the web guide. Now, if you're trying to correct a transient error, it really depends upon what is the magnitude of the error, what is the frequency of the error and so on.
And another important thing that we need to consider is that these transient errors can actually propagate downstream of the sensor and these are called what are called as wave generation. Even though you correct it at the sensor, you don't really know the angle at which the web is approaching and that can cause weaves downstream. You won't have good guiding performance if you have wrinkles. I mean, if the web is wrinkling, that is going to cause the edge to move back and forth.
There's no way you can have good guiding performance with that. Or edge curl, flutter, or sometimes plane change can also have that effect. If you have large magnitude error and your stroke of the actuator is limited or the correction that the webgate can provide is limited then you can expect good grading performance whenever the actuator tops out on either side of its stroke. If you use a lower bandwidth actuator and you have a higher frequency error, you can expect good guiding performances and sensor.
If you don't have a good sensor or if it has gain changes then you can expect a good guiding performance and then improper installation can actually amplify the error. So that's another thing that we can expect. Anyway, so just to summarize the factors affecting we talked about a machine related, process related, material related and the web guide related which is like the stroke deadband actuator backlash correction stroke limit and things like that. So in terms of design requirements uh a good knowledge of the the the conditions like web speed location thickness stiffness environment tension side correction all of these are important for us to have a welldesigned web guide.
If you have a good understanding of all of these, we will do well. [Music]
Understanding the Key Components of a Basic Web Guide System
In this episode, we delve into the essential elements of a basic web guide system. We explore the four main components: the guide structure or mechanism, the actuator, the sensor, and the controller. Learn how each component plays a crucial role in ensuring precise web positioning, from making physical contact with the web to providing feedback and executing corrective actions in a closed-loop feedback control system.
Transcript
Show full transcript (296 words)
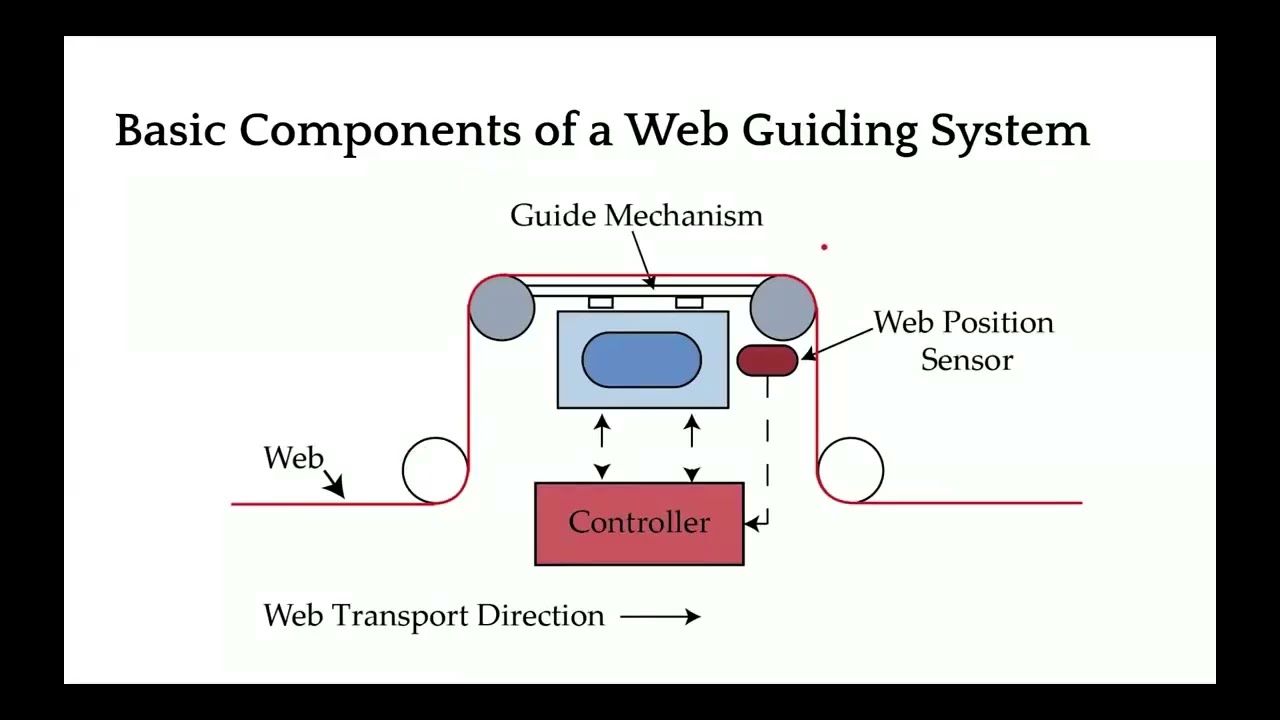
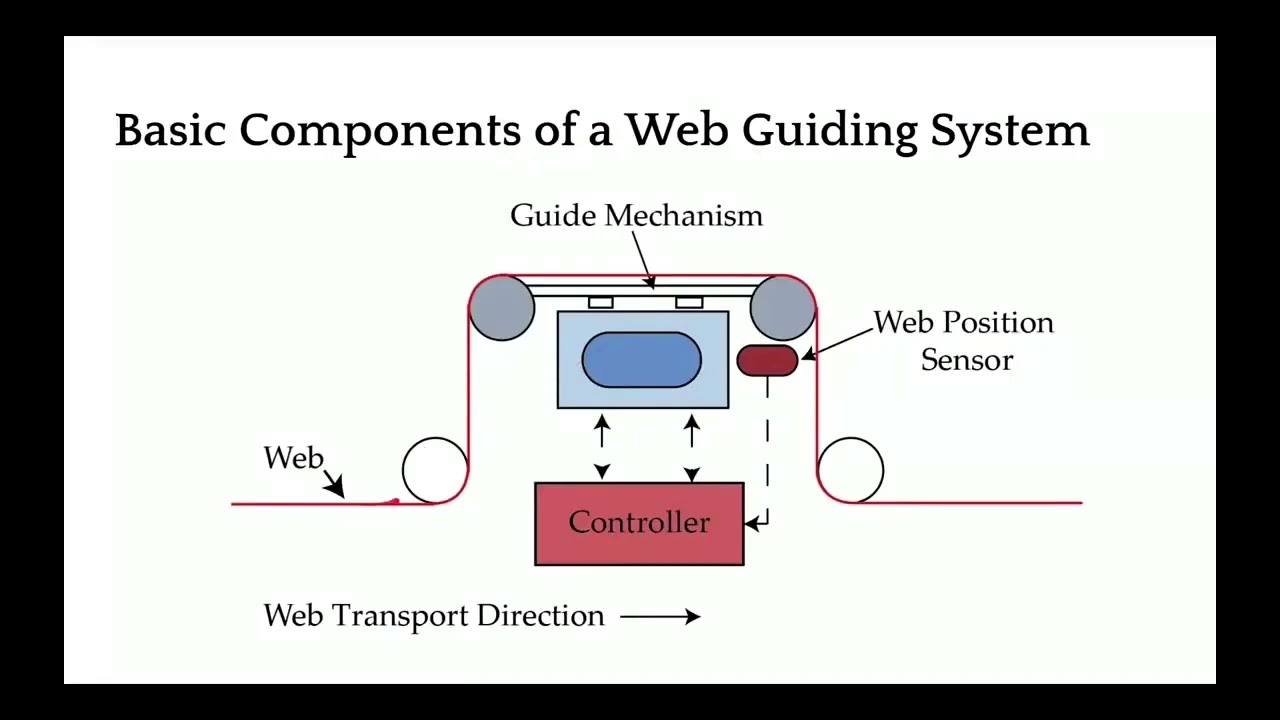
In terms of a basic web guiding system, we are mainly dealing with four main items apart from the web. One is the guide structure or mechanism. This is the device that is actually making contact with the web and that's the one that is need to be moved or it moves the web. There are different types of guide structures that we will go through.
The other component of a web guiding system is an actuator. So actuator is something that takes an electrical signal and converts that into physical motion so that it moves the guide structure so that the web can be located at the desired location. The third and one of the most important components of a web guiding system is a sensor. The sensor is the device that provides the feedback.
The sensor is the one that tells us where the web is inferring the position and then that signal is sent to a controller. The controller is mainly the intelligence or the brains that takes that sensor signal and computes the corrective action required. So the actuator can move the guide mechanism to the the location where we can get the desired web position. Again, another schematic of how the components of the web guides are.
Web is a part of the web guiding system. And then you have the mechanism. There's an actuator inside the mechanism. The sensor gets the position feedback of where the web is, sends that information to the controller.
controller then computes an error and it sends the command to the actuator so that the mechanism can be moved to position the web at the right location. This is a closed loop feedback control system that is a main part of a web guiding system.
Understanding Terminal and Intermediate Web Guides
In this video, we delve into the basics of web guides used in roll-to-roll machines. We explore various terminologies and types of web guides, including terminal guides like unwind and rewinds, as well as intermediate guides such as offset pivot guides and steering guides. Key distinctions and common applications in different industries are highlighted, providing a comprehensive overview of these essential components in web handling.
Transcript
Show full transcript (270 words)
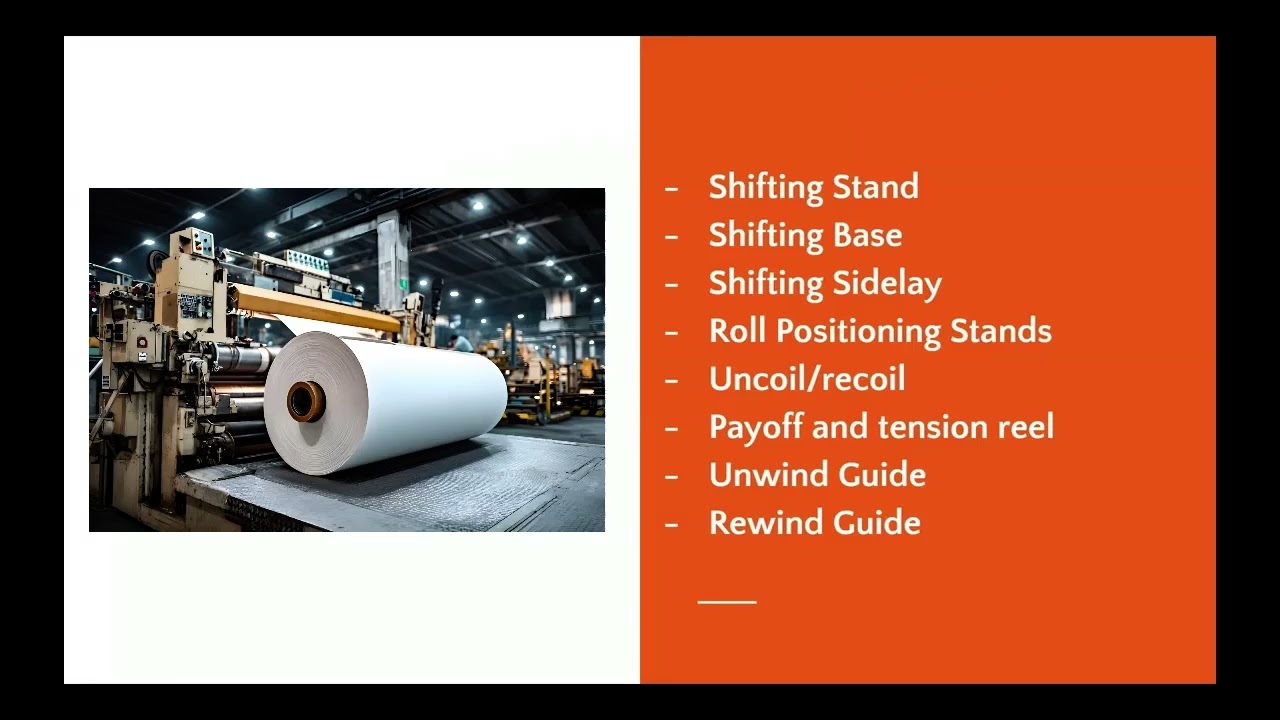
In terms of location, when you have a web guide that is located at the entry and exit of the machine, they are called terminal web guides. There are lots of names for these and some of the common names are shifting stand, shifting base, shifting side lay or roll positioning stands. If you're in the metals industry, it might be uncoil or recoil. In other industries, it might be called payoff and tension reel.
Specifically, in these presentations, we call them unwind guide is something that is at the uh entry of your roll throughroll machine while a rewind guide is at the winder or the exit of a roll to roll machine. These are some of the terms used for terminal guides. In terms of intermediate guides, these are the web guides used within the process within the machine. There are multiple types of web guides.
The most common one is called an offset pivot guide. Other names for offset pivot guides are displacement guides, positive displacement guide, pivot frame, or table guide. The second most commonly used intermediate web guide is a remotely pivoted guide. That's a technical term term but most commonly it's called as steering guide or a steering roller or a swivel roller.
And then there are other less common web guides like end pivoted guide or center pivoted guide and then even turn bars are all available. We'll take a deeper look at all of these different kinds as we go along. Most of these web guides work on a basic fundamental principle and that is what we call it as normal entry.
In this educational video, we delve into the fundamentals of web guiding systems, essential for the Converting Industry. We'll explore four key components of a web guide: the guide structure or mechanism, the actuator, the sensor, and the controller. Learn how each element works together in a closed loop feedback control system to ensure precise web positioning. Ideal for industry professionals seeking to enhance their understanding of advanced web handling technologies.
Transcript
Show full transcript (296 words)
In terms of a basic web guiding system, we are mainly dealing with four main items apart from the web. One is the guide structure or mechanism. This is the device that is actually making contact with the web and that's the one that is need to be moved or it moves the web. There are different types of guide structures that we will go through.
The other component of a web guiding system is an actuator. So actuator is something that takes an electrical signal and converts that into physical motion so that it moves the guide structure so that the web can be located at the desired location. The third and one of the most important components of a web guiding system is a sensor. The sensor is the device that provides the feedback.
The sensor is the one that tells us where the web is inferring the position and then that signal is sent to a controller. The controller is mainly the intelligence or the brains that takes that sensor signal and computes the corrective action required. So the actuator can move the guide mechanism to the the location where we can get the desired web position. Again, another schematic of how the components of the web guides are.
Web is a part of the web guiding system. And then you have the mechanism. There's an actuator inside the mechanism. The sensor gets the position feedback of where the web is, sends that information to the controller.
controller then computes an error and it sends the command to the actuator so that the mechanism can be moved to position the web at the right location. This is a closed loop feedback control system that is a main part of a web guiding system.
Different terms related to web guiding are discussed in this article.
Web Guiding
Web guiding is the process of regulating the cross machine position of the web while the web is transported over the rollers in roll-to-roll processing machinery. Other terms for web guiding include:
What are Pneumo-Hydraulic Web Guides?
Many displacement guides, steering guides, unwind / rewind guides manufactured in the 1960’s, 1970's, 1980’s and 1990's were controlled using both pneumatic and hydraulic control systems which are often referred to as pneumo-hydraulic web guides. These web guide were really common before the mass adoption of the electronic (analog and digital) controllers and electric actuators.

The Pneumohydraulic Replacement Kit from Roll-2-Roll Technologies comes complete with Cylinder Replacements. We've adapted these cylinders, so they can just drop into the pneumohydraulic machines. Learn more about Pneumohydraulic Replacement Kits at https://r2r.tech/products/web-guide-replacement-kit
Transcript
Show full transcript (162 words)
so one of the important features when we're doing a pneumo hydraulic retrofit is the replacement of the hydraulic cylinder and in this case we do that replace with one of our linear hyper actuators and we have actually prepared them in such a way that you can use them as a drop-in in place of the hydraulic cylinder now one of the main features is we can do it for any size as long as we have the dimensions that you want to do it that you want to put your the actual area in but at the same time we provided with two types of brackets on the on the back end and I bracket or you can have a closed bracket on the back end and of course on the rod end we would have a closed bracket so this is one way you can easily replace the hydraulic cylinder on your retrofit of the pneumo hydraulic system you

Check out this video to see how easy it is to simply plug in and use our web guiding system without any type of setup or calibration.
Transcript
Show full transcript (324 words)
this is February Lascaux of rolls roll technologies in our series of showing you about that some features of our webcast and today we want to show you how simple it is to install the cat just to put it in operation right now we're showing you a 12 inch web guide which if we have installed in our testbench and it's a really simple it's four points where we actually fix it to the Machine and what happened the same one you're in your facility now in this case we already thread the machine the web guide with some the two and we have position the sensor where we would like to show a habit position as you can see it's a very simple sensor so it only has one face and so it's a taken away from the u-shape remember our sensors can actually detect any kind of material without having to be adjusted and now as you can see on the back side of our guide you can see that there are only two positions that we're going to plug into the first one is we plug in the sensor we have actually identified the sensor position sensor 1 and then we connect our power supply just fix it to it and if we look at the other side that as you can see the web guide reacted because it's already in operation let's go to the other side to the front and you can see our panel right here see and now it's indicating that it has located the sensor and it's ready to go and now I'm going to put this machine to work as you can see this is a very simple installation what we did let's just plug into two cables and when the key is operational come with us to Roloff acknowledges and this melts you understand more or less and how I guess didn't plug in place
The compact web guiding system from Roll-2-Roll Technologies is powered by the ARIS web position sensor. The revolutionary sensor technology enables the web guide to work with any material without the need for setup or calibration.
Transcript
Show full transcript (106 words)
RS is an intelligent guiding system that uses a revolutionary fiber optic sensing technology to accurately measure web position in this video we use a two guide test machine to show how RS handles change in materials one machine creates the disturbance while one corrects this disturbance air patented agnostic material sensor allows RS to adapt seamlessly to any material including paper transparent plastic non-woven and textile without having to manually readjust the machine watch the red laser to see the difference between the controller when it is on versus when it's off you can find a link to more information in our description below e