September 12, 2025
Unveiling the Advantages of the SCU6x Controller & ODC Sensors
Transcript
Show full transcript (296 words)
One of the key things with our SC6X controller and the ODC sensors is that [music] they not only are used for guiding purposes, they're also used for any type of cross machine direction width measurement applications. It could be measuring the width of a single web or multiple webs. Here again to reiterate on some of the advantages of the ODC sensor is that it's a one-sided sensor technology. So it allows us to install the sensor in tight installation spaces whereas a camerabased traditional machine v machine system might need a long longer field of view and working distance which creates issues if you want to add an width measurement system to an existing machine.
The other advantage is that the light source, the optics and the camera, everything is built into a single interface like what we have here. We don't have to have a separate light source or gantry [music] to have the camera and the light source built in. The third advantage is that the sensor provides a one one magnification. If the object is 100 mm wide, we're using a sensor that is at least 100 mm wide.
So, we get a one one magnification. The advantage is that when you go to a wider width, you don't lose any resolution. So for example, this ODC 960 which is a measuring range of 960 mm can provide the resolution of 127 micron on the camera level and then sub pixel with that you could get up to about 33 micron resolution. your resolution is not affected by the field of view that you are requiring.
Because of these advantages, the ODC sensor is used for a lot of different applications, especially in existing slitter rewinders where you want to measure the width of the material.

September 2, 2025
In this episode of our webinar series on web guiding fundamentals, we dive into the critical role of sensors in web guiding systems. Learn about various sensor terminologies such as range, resolution, accuracy, and linearity, and understand the importance of accurate measurement for effective control. We discuss different sensor technologies including infrared, optical, and ultrasonic, and explore the challenges they face including issues with temperature drift and material properties.
Transcript
Show full transcript (725 words)
[Music] One of the most important parts of a webg guiding system is the sensor. It is important because what you can't measure, you can't control. If you have a poor sensor and you're not able to measure the position properly, then there's no way that we can get the accuracy that we need. In terms of sensor terminologies, range, resolution, accuracy, linearity, those are some things that you would see.
type of sensors, infrared, optical, ultrasonic, air type of things that you're trying to look for in terms of web position. Are you trying to look at edge of a web? Are you trying to look for a line on the web or a contrasting feature on the web? How fast can the sensor measure?
Older ultrasonic sensors have issues with past line changes. You can't have the web too close to the ultrasonic emitter because it might reflect the sound waves in a way that doesn't provide an accurate measurement. And then temperature drift. Again, ultrasonic sensors can have issues with temperature drift when we have the P2 electric crystal frequency changes.
And then what kind of a signal output that you get from the sensor. Range of a sensor is the maximum lateral displacement the sensor can measure. Most often for web guiding applications, range is not that important just because of the fact that you're controlling. You're going to bring it in.
But it does becomes critical when you have web width changes and things like that. Most often range is like how much change in the lateral position that you can measure with the sensor. Resolution is the minimum lateral position change that the sensor can see. So if you want to guide a web to 5,000 of inch, then you better have a a sensor that can have 4x or 2x higher resolution than the guiding accuracy.
Accuracy is an indication of how close the sensor measurement is to the real measurement. This becomes important for certain types of sensors affected by materials. Material properties like opacity, porocity and things like that. This is an important characteristic of a sensor.
Linearity is like what how consistent is your measurement with respect to the actual position across the entire range of the sensor. In terms of sensing, why is it important? Some sensors have issues with material properties like opacity, porocity or reflectivity or they may be affected by environmental issues such as air flow, temperature changes or vacuum. So if we can't measure, we can't control.
That's why sensing is an important part of guiding performance. Most often you would see these type of sensors we refer to as opposing beam or fork style or horseshoe style. There are lots of different names for it. Basically how this works is you have one arm emitting a certain type of signal and the other arm receiving that signal and then the web that goes in between blocks it.
It's a simple technology work sensing principle and it works well for a lot of different cases. The problem happens whenever depending upon this type of sensor signal that you have if the web allows that signal to leak through when it's blocked by the web that's where the pro problem occurs. We talked about linearity resolution range all of those things are affected by this kind of sensor. This sensing signal can be air, optical like visible light, infrared lights, or even UV light.
It could also be sound like ultrasonic. It really doesn't matter. And then whether this material is opaque or porous to that signal is what matters in terms of how well you can guide. Often manufacturers recommend different sensors for different materials and conditions.
So you will have a plethora of sensing technologies out there. Like I said, the main disadvantage is material dependent gain change occurs and then requires calibration if you want to get a really good guiding performance. There are other sensor technologies out there like ours which are not affected by material properties and some of the environmental conditions. I'm not going to go into detail about our sensor technology here but just give you a quick overview.
is basically a high accuracy direct measurement or absolute measurement. Our resolution does not depend upon the range and it can work with any material. [Music]
August 29, 2025
Optimizing Sensor Placement and Roller Position in Displacement Guides
Transcript
Show full transcript (284 words)
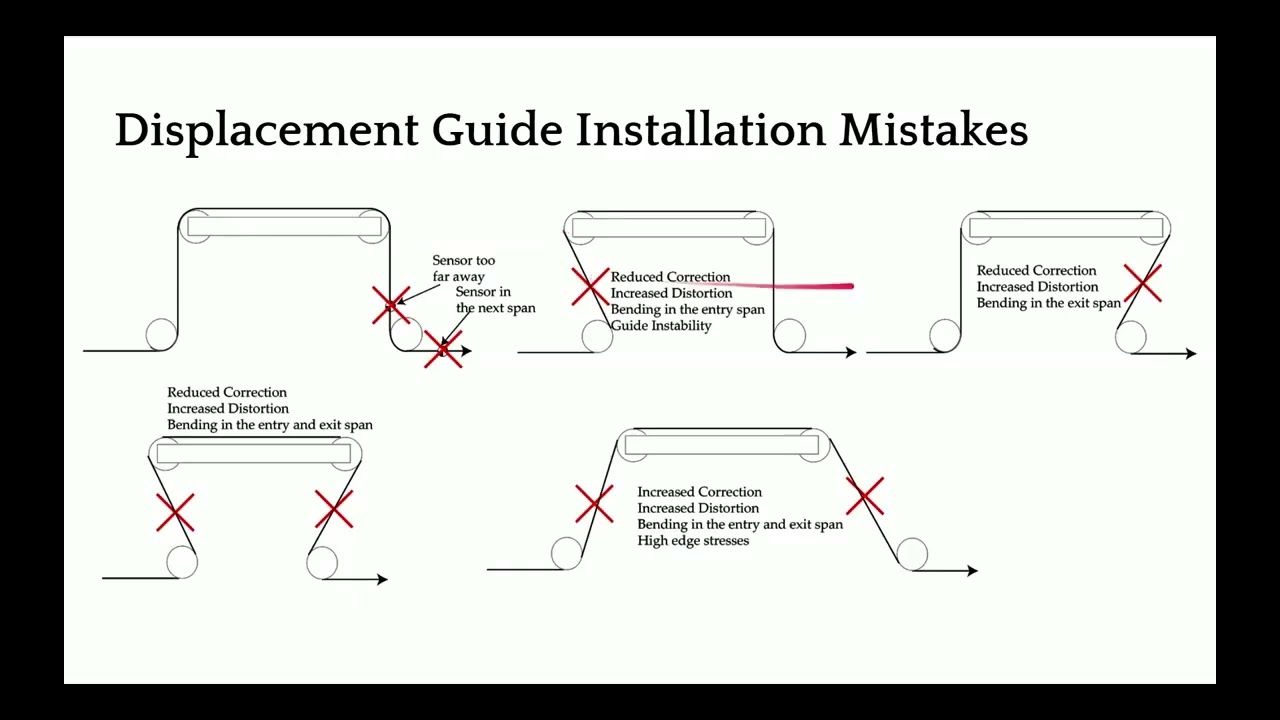
[Music] We don't want to install the sensor too far away or in the next span. This is mainly for control system purposes and stability. When the web guide makes a corrective action, that action is not seen at the sensor immediately. So, if you're running really fast, you might get away with moving these sensors a little further down.
But if you're running slow, whenever this web guide moves here, you would see that motion, if the sensor is as close to the exit roller as possible. If you install it here or here, especially when the web stops and there is a small error, the web guide would keep moving and that might cause the web to break or have unintended consequences. So, we don't want to have the sensor further away or in next span. And we don't even we don't also want to have a scenario where you have an angle that is not 90°.
If you have a 90° wrap, you have twist. As soon as you introduce something which is deviating more from the 90°, you start creating bending in the web. So these kind of bending is going to act as under steering the web. It's going to cause bending that's going to under steer the web and it also causes distortions and guiding stability.
So we don't really want to have any of these conditions. On the contrary, if you have a span exit span that is spread out like this, this is going to over steer the web. It's the bending effect that is causing that and we really don't want to do that. So ideal scenario would be to have a 90°ree wrap in and out.
[Music]
August 28, 2025
This episode is part of the ‘Web Guiding Applications and Advanced Web Guiding Concepts’ series and focuses on advanced edge guiding techniques, specifically single edge web guiding. The video explains the use of web guides and edge sensors for feedback in guiding mechanisms. It covers the positioning of sensors, the importance of alignment, and the common practice of repositioning sensors during web width changes. The episode also addresses potential operator errors and their impact on web guiding performance during product changeovers.
Transcript
Show full transcript (280 words)
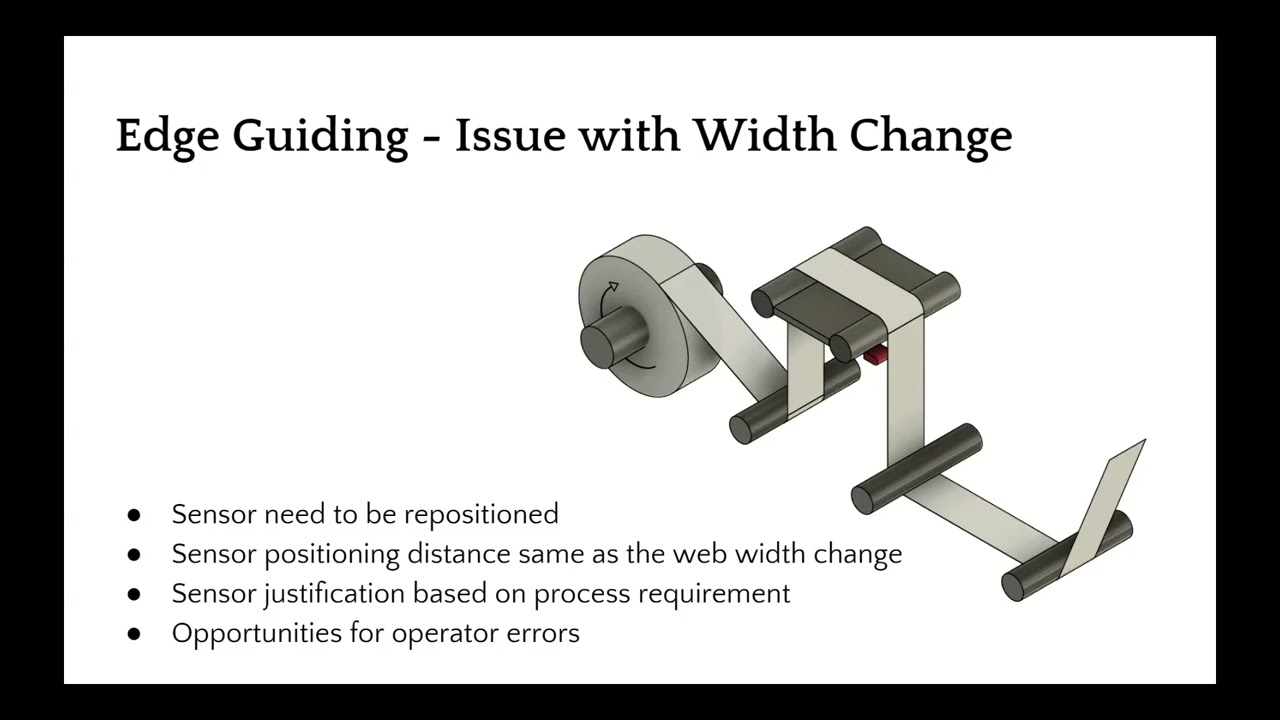
So in terms of edge guiding, most of you are familiar with this. We have a web guide and an edge sensor to provide feedback for the web guide mechanism. Last month we talked about the guiding principles and fundamentals of it. But essentially in most machines in edgeguiding kind of an application you position the sensor either on the operator side or on the drive side drive or the gear side and then the web is guided to the middle of the sensor position and the sensor is positioned along the cross machine direction so that the alignment provides the required justification of the web.
The main thing with this kind of a system is that it works well for most cases and for maybe majority of the applications there's no issue with it. The main issue comes when we have to change the web width. Whenever there is a product change over and you do a web width change the sensor has to be repositioned. As we get narrower, the sensor has to be moved to a different location.
That location of the sensor has to be justified based on the process requirement. In these examples, the sensors were moved so that the web center line position is always the same irrespective of the web width. But in certain other applications, it may be necessary to justify along the operator side or maybe along the drive side. So that is the only thing someone has to do in terms of product change over is to move the sensor.
But moving the sensor creates opportunities for operator errors and this can have other consequences with the web guiding performance.
July 1, 2025
SCU6x Controller Calibration for Precision Width Monitoring
Transcript
Show full transcript (800 words)
One other thing we need to do whenever we are initially setting up is um onetime calibration procedure that can be done on this screen. The idea for this is that we have the ability to calibrate our sensor for your conditions. We do have a calibration done in the factory, but when it's being installed, the sensor might be installed at a different distance than what we typically expect. And there are other things with the lighting and contrast that might change some of these parameters.
So, this calibration is necessary only if you're looking for a higher resolution measurement. For example, if you're looking for a tolerance of plus or - 1/16th of an inch, you don't need to do any of these calibration things. But any anytime you are below that. So anytime you're below a millimeter or below a 1/16th of an inch resolution, you would need to do a calibration.
This is done just for that particular setup. Once you do it, you don't have to do it for the rest of the run. It'll be stored and you take that calibration value. What does the calibration do?
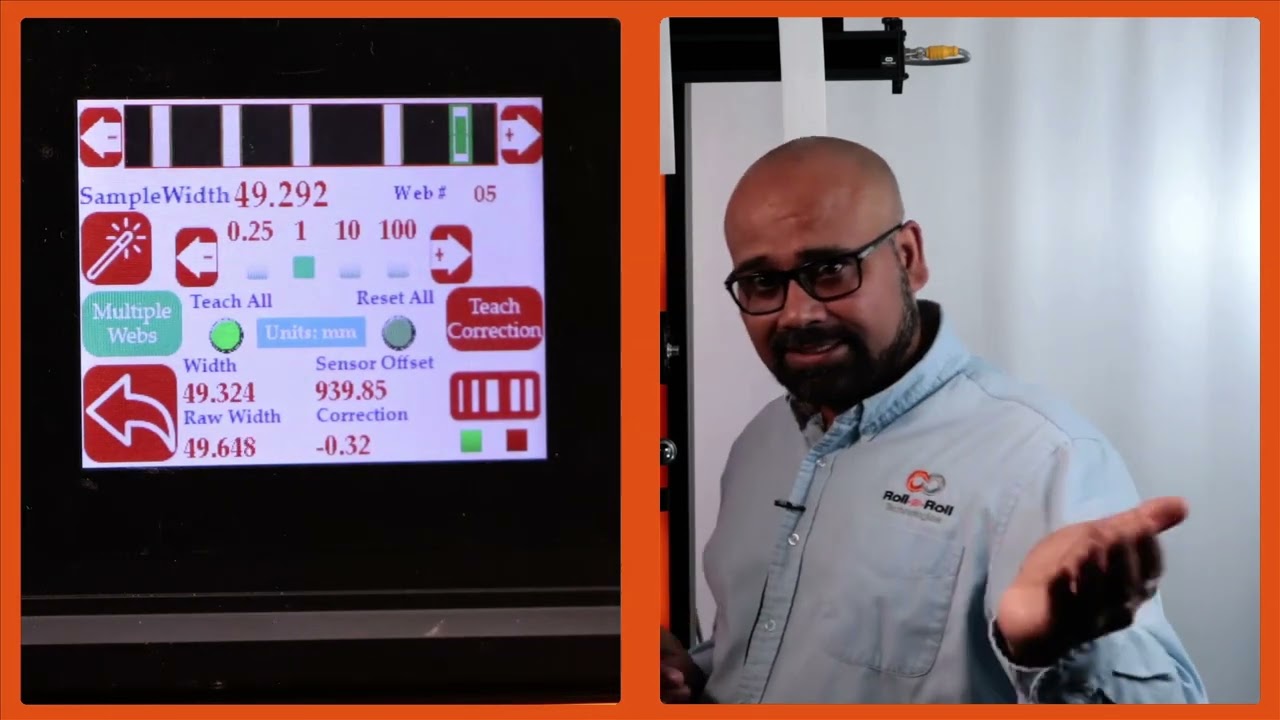
Essentially, I have a material or a sample of a known width and the sensor is providing a raw measurement. We're going to compare those two and then say the calibrated measurement is based on the actual sample width and whatever the raw offset is, that's the correction we are going to use for the rest of the measurements. So that's indicated here. So that's basically saying what is the correction from the actual width to the measured width.
That's essentially what the calibration is. So it's just creating a offset. So for example, let's say the sample width is 46. To change that, you press whatever you need to increment by and change that value.
I am going to put that as 49.244. Right now it's measuring 49.293. If I want to teach this, my sample width should match my measured width. To do that, press this teach icon and then press accept.
Now it has applied a correction. Essentially the raw width plus this correction gives me my actual width. And that's pretty simple. It's just a regular bias or correction that we are adding.
Nothing fancy about this calibration. So you can do that for all these other materials. We don't necessarily need to do this if your tolerance is 1/16th of an inch or 1.5 mm. We don't need to do that.
But for some customers looking for a higher resolution, you do that calibration procedure. Now, just to make it simple, you can enter all of these sample widths already and then you can do a one-time teaching. Let me show you how that works. I'm going to enter this sample width here.
Okay. So, if I want to do all of them together, I'm going to press this teach all button. Make sure that it's highlighted. And then I'm going to press this teach and accept.
Now, all these samples will have a correction. Before we had everything as zero. And if I now scroll through web five, web 4, web three, web two, and web 1, all of them now have a correction. So it's just a quick way for you to do this.
The general use case for this is that let's say you are a customer in automotive or medical and you have a QC process where you are only sampling a part of your product. You are setting up your slitter. You pull the initial sample after the operator has set up the slitter and you take that sample and you're doing a QC on that. Now, essentially what you're going to do is take that sample and enter it like what I have here.
Then you're going to do a teach all. Once that is done during any part of the run, we are taking that measurement online in line 100% of the time. So that's the biggest advantage with this system. In your typical process right now, you might be doing one sample at the beginning of the run.
At the end of the run, the operator needs to stop the machine, take that sample, give it to QC, take the measurement, and then everything is good. You run it, and then every time the machine is stopped, there is another sample that is taken. So, this is a random sampling process with a lot of time involved between one run to another. and we completely eliminate that and allow you to keep running the machine and monitor the width all the time.
So that's the biggest value proposition with our system. And that's essentially it. So that will allow you to calibrate each of these samples and be done with it.
November 5, 2020
AIMCAL R2R 2020 Conference: Advanced Web Guiding Applications and Concepts
Transcript
Show full transcript (5014 words)
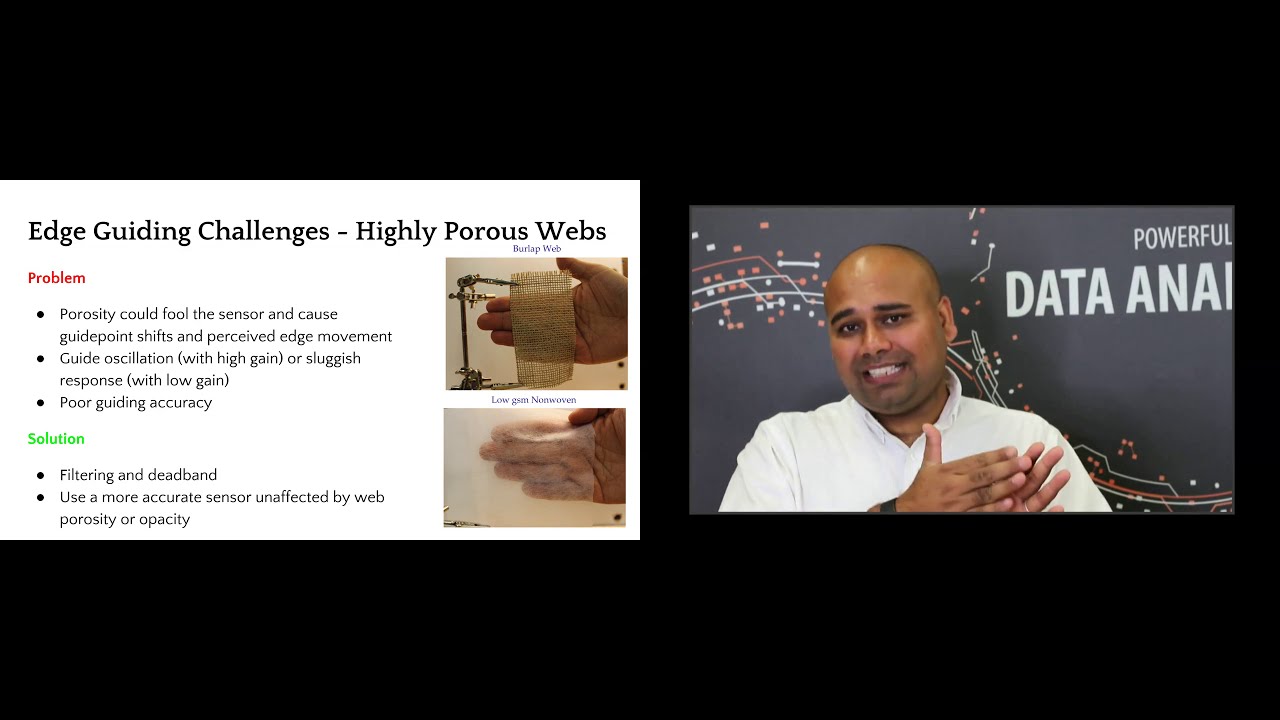
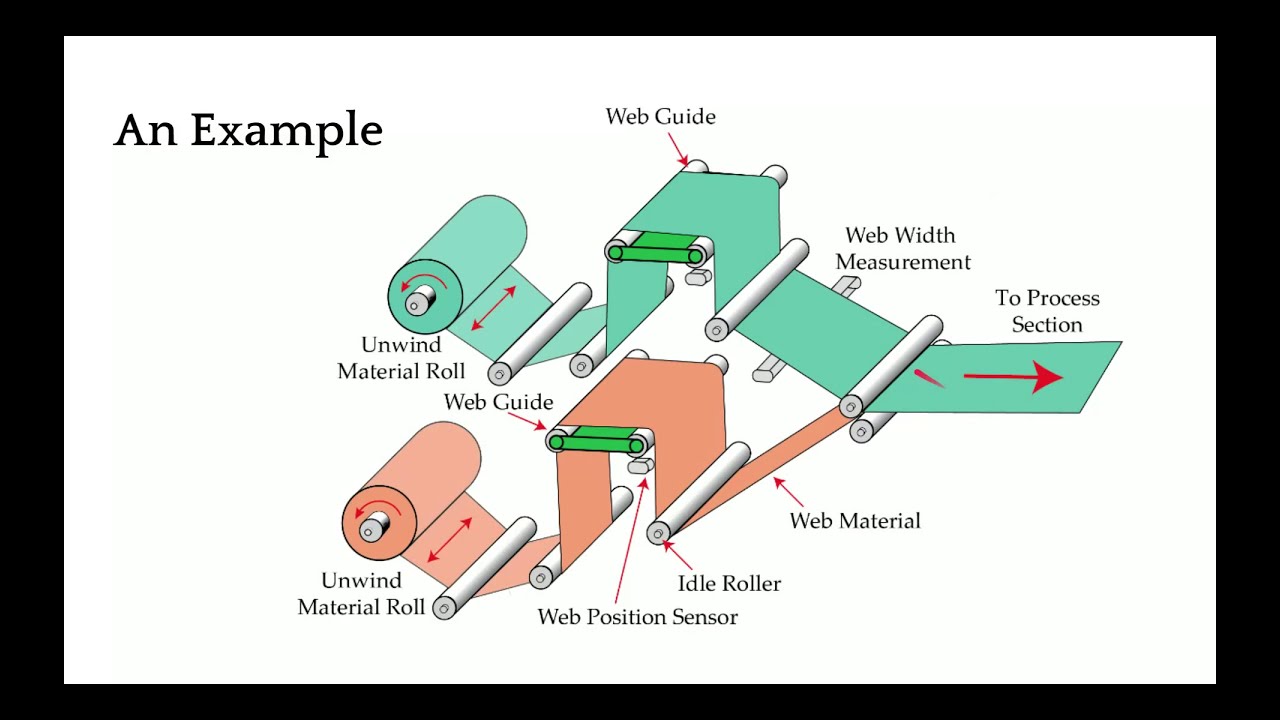
good morning everyone this is aravind se chadri from roll to roll technologies i'm here today to talk about advanced web guiding applications and concepts before we begin let's look at some of the basic concepts regarding edge guiding center guiding sensor positioners moving sensor center guide what do we mean by guide point what do we mean by remote guide point uh what is a dead band and what is edge filtering we will use these concepts to build on so that we can look at how some of the challenging guiding applications can be solved uh by uh some of these things that we initially cover so uh everybody is familiar with edge guiding if not edge guiding or guiding basically is to align the cross machine direction position of the web within a roll roll-to-roll machine so you're laterally positioning the web at a certain location in the cross-machine direction of the web this is typically done with a single sensor and the sensor measures the position of the web and sends that information to a control system and uh based on the measurement and the reference there's an error that is computed and then the control system sends the command to the actuator and then the mechanism uh the web guide mechanism moves the web and then this is a closed loop control system that keeps going on typically one sensor or two sensors are used and in a single edge guiding application the sensor may be installed on the drive side or on the operator side depending upon what is required and then the sensor is typically positioned at a constant or a predefined uh reference within the machine so that the web can be guided uh to a certain position within the machine now the main issue with a single sensor web guiding application is that um whenever the web width changes then somebody has to go move the sensor and uh depending upon your process uh if the process is aligned to the center of the machine or if it's justified to one side of the machine the sensor might have to be moved at different locations and any time when you have to move a sensor that causes downtime and it also introduces an opportunity for error and operator error so that's the main issue with edge guiding with a single sensor and and apart from edge guiding there are some situations in which center guiding is used where you have two sensors each of them looking at one edge of the web and then they send the signal to the controller and the controller averages those two measurements and then based on that average measurements it computes the error and then it moves the actuator based on the error the main reason why the center guiding is used is in applications where there is an inherent possibility of a slight variation in the web width let's say you have an extrusion process you're extruding the web but it's not a a straight edge it might have some amount of variation there to reduce the effect of either justifying to one side where you you might have a perfectly round roll on one side and then a really jagged uh raw uh edge on the other side it's common for um manufacturers to use two sensors to center guide the web now even with the center guiding application when the web weight changes uh somebody has to move the sensors and again like um a single sensor you need to move it at the right location and now you have two sensors that needs to be moved and then these two sensors have to be positioned exactly equidistant from the center line uh all of these causes time and if there is an error then it causes downtime as well so in order to avoid this some manufacturers have what is called as automated sensor positioners instead of manually moving the sensor you can automate that by connecting an actuator to the sensor and you can move one or two sensors based on what product you are running and you can automate it by setting all of those into the plc so that based on the product code the sensor is moved automatically this does reduce the downtime and then it also helps reduce the operator error but this system is a little bit complicated um because you have a system lan an actuator it needs another control loop to move the sensors and if those sensors have to move automatically without an operator kind of pressing a button to get it to the different location then you have an additional control loop in there and that increases the complexity of the system and then when you have an additional control loop you also need to tune the control loop so if the web width kind of varies like like this and if the sensor is automatically moving it's oscillating back and forth then the gains of those system has to be uh adjusted just right so that it doesn't never miss the web and then it's not too aggressive that it can run into the web and damage the web so this increases complexity additional actuators additional drives that are involved and overall it adds more mechanical wear and tear to the system um a better way of doing this is to just have a white sensor uh if your sensor is wide enough to accommodate any web weight variation then there's never ever a need to move the sensors and you can put one sensor on each edge so you have a center guiding sensor center guiding application with two sensors and with the web width varies and if the sensor is wide enough to see all of the variation then you would never have to move the sensor and you can still do that one of the key things in accomplishing accomplishing this is uh basically what we call as a guide point so when you have a single sensor and you're guiding the web uh based on the measurement from the sensor the control system is going to use a reference signal and that reference is usually the middle of the sensor's position measurement so if the sensor has an output of 0 to 10 millimeters and 5 millimeter for example would be the reference and if the web goes at four millimeters or if the web is at six millimeters then there is an error that is being created based on the magnitude and the direction of the error the uh control system sends the command to the actuator to move the web guide and most most often the guide point or the reference is in the middle in this case it's 5 like what i mentioned now instead of moving the sensors manually what can be done is actually move the reference within the sensor so instead of guiding to five millimeter when the web weight changes you can guide to two millimeter as the reference so if the web is at one millimeter it creates a negative error and then when the web is at three millimeters it creates a positive error and now your guide point is moved to two millimeters and this is what is called as an electronic guide point change the main advantage with the electronic guide point change is that if you have a sensor that is pretty wide and let's say you have a sensor that is 17 inches wide then any web width variation you don't have to move the sensor so that the web can be guided to the middle of the sensor you can just electronically move the guide point to a location so that the web can be guide at that location and this is a simple uh thing that can be done it's easily it can be automated easily and then you don't have any mechanical wear and tear because everything is fixed and you never have to move the sensor and this is what is illustrated in this uh animation here where if the guide point is to the left or to the right then the the reference for that control system uh is going to be at that location and then the actuator is going to change direction at that arbitrary location so you can technically have the guide point anywhere within the sensing window uh but it is very common to limit the extremes um so that you don't put your guide point all the way to one edge or all the way to the other edge the main reason is that once the web moves past that edge irrespective of where it is it's hard for you to know what's happening there so you you want a little leeway so that you don't go all the way to the extreme on either direction so uh it could be like you can go up to 90 of the sensor range that's where the guide point can be changed uh but within that remaining five percent on either side you cannot change the gate point uh so this this is what is called as an electronic guide point change and it's very common especially with a wider sensor and this enables operators to not to move the sensor and have a quick product changeover and then when we do center guiding the guide point change actually doesn't you don't need to do a guide point change when you do center guiding especially with two sensors and that's what this map is showing is that even if you move the sensors uh on either direction the guide point doesn't change so this is making it a lot more simpler so center guiding with two sensors is a lot more simpler than uh edge guiding and then even when the webwork changes you never have to change the uh guide point so these are the advantages like i mentioned center guiding with the white sensor is a lot more simpler reduces uh the mechanical wear and tear inherently it averages so that's like a filtering and then it's a simple to install operate and then helps you with the quick product changeover and then you can use this sensor to as a web detect sensor and as well as to monitor the width of the web because you can see both edges of the web another concept that is commonly used is what is called as a dead band a guide point is the reference from which the the the uh error sign changes now dead band is a region around the grade point where we can still say the error is zero and then uh beyond the deadpan is when the error becomes paused toward negative and uh this is done mainly to avoid any issues with uh artificial uh edge position variations that are created by edges that are kind of fuzzy or rough where the web is actually not moving just that the edge is kind of jagged in order to avoid the web guide from moving back and forth we can use a dead band onto it and finally a concept called edge filtering it's basically uh instead of taking the measurement instantaneous measurement you can filter the data uh in time and a typical filter that is commonly used is an exponential moving average filter and this helps in significantly reducing the variation of the edge position especially when you have some kind of an edge that is jagged and it's not really representative of the actual web position but just that the edge is kind of jagged like that this plot is just showing how if you have a standard deviation of 7 and then if you do a filtering for example you can reduce that variation by 50 and then if you do an averaging with that you can reduce that even further so the top plot is showing the measurement from one sensor the bottom plot is from another sensor and then the middle plot is the average of those two sensors that would be the center line center guiding kind of thing uh so some looking at some examples um let's say you have an edge like this um the web is pretty uh jagged and this is from an extrusion process now you don't want to take the instantaneous measurement and guide the web because the web guide is going to be oscillating back and forth it's going to be crazy what better way to do this is to use two sensors so you get an inherent averaging of those two edges and then add a dead band basically if you have an idea of the profile of this edge that is varying based on that you can create a deadband value and then filter the edge position so that the the steady state or the gross position of the web would be at a fixed location then even when the edge measurement is not that great you can still have the web guide to not oscillate um instead of there are situations where you deliberately have an edge with a certain profile like what is shown here and it's got a sawtooth kind of profile the main problem with this is that none of the conventional techniques would work because that when this web goes underneath the sensor and you're looking at that edge position depending upon the speed depending upon the sensor measurement frequency and depending upon the duty cycle of the sawtooth wave when you do any kind of an averaging you're going to shift the guide point you're going to have that average move whenever any of those conditions change for example let's say you're running a thousand feet per minute and you do all of these things and then now you go to uh 2000 feet per minute that's going to cause a shift even if you do any kind of an averaging so temporal averaging or time based averaging is not a solution for that but a spatial averaging or spatial filtering is a solution in this case you would align the sensor vertically along the machine direction and then have some kind of a like a bang bang control to be able to guide the web this is a technique that we use to guide some of these webs like this another common problem that we would see is uh wrinkles uh basically what uh wrinkle is that whenever there's this trough and the valley that is created on the web it's going to suck the edges in and out in and out in and out based on how the wrinkles are flowing and this is going to cause an edge position variation which is not representative of the web position the edge may go in and out but the web may be still in the grass position so this affects a lot of systems and the best way to tackle this is to do center guiding and based if you have any information about the wrinkles you can have that use that in your infinite impulse response exponentially moving average filter to reduce that effect and then also use a deadbend so depending upon how much the width variation is you can put that into your system so let's say the wrinkle is causing the width to change by a millimeter then you can have half a millimeter of deadband on either side and that would make sure that the wrinkle is not causing the web to oscillate but in reality these are all kind of like a fixes and these are not real solutions for the wrinkle problem and in this case you have to go and fix the underlying wrinkle problem but to avoid the web guiding from oscillating these are some things that we could do and finally uh there are situations where especially in diaper manufacturing or non-moments where you're running a porous web and then the sensor that you're using to run the porous web is affected by the porosity of the web and what it essentially would do is depending upon the density of the web underneath at that instant when the sensor is making the measurement that's going to change your output of the sensor so the output of the sensor may be varying based on the density of the web at the instant that you are measuring this will cause an artificial variation in the edge position which is unwanted and the best way to avoid this is to use a sensor that is more accurate that is not affected by porosity variations and density variations and if you cannot do that then the the other best way to do it would be to do some dead band and filtering and depending upon how much accuracy you can achieve so whenever you add a dead band and filter you are reducing by adding deadband you are reducing the accuracy that you can get and then by adding filtering you are reducing the dynamic response or how fast your uh system can correct that error you are reducing those so it's a trade-off based on uh what is uh what is the ultimate objective and this is just an illustration kind of showing like when you have an artificial edge position variation and then when you do a center guiding you can see that the middle plot is the set the top plot is one sensor the bottom block has another sensor and then when you do a center guiding where you take the average of those two just by doing that you you're reducing the variation and then if you add a exponential moving average filter to it you're reducing it further and then if you add a deadband to it then you are reducing that even further so this is shown in this table here and you can see we start off with about one millimeter of standard deviation and then by just by filtering we got about 40 improvement and then if you do filtering exponential moving average and dead band you get about 70 percent reduction in the variations and again these variations are artificial so um the dead band and the exponential moving average uh the filter time constants have to be designed based on that information that hey how much is the variation and things like that all of these can be avoided if you use a sensor that is not affected by any of those uh finally the the uh whenever we are looking at uh guiding a web there may be situations where you might want to guide multiple webs um and this is true in lamination or coding or extrusion lamination any of those scenarios in those cases you can typically guide two layers of the web independent of each other and then guide it to the same machine reference then you can achieve a proper lamination at this point but the main problem with that is when the web weight changes or if there's uh any centerline guiding uh kind of application then you need a little bit more uh coordination between these two systems these two layers the web one of the things that has been done mechanically is to chase the web and in that case you have a web master web that is there and then there's a sensor that is installed to chase the web it means that if the web moves uh one inch on one side the sensor would actually follow and chase the web so there's a control system that is kind of chasing the web and that particular sensor is connected to the other sensor on the other layer and this basically means like okay if the web moves on the bottom one inch i'm going to move my sensor one inch on the top and this is done automatically so there is a control loop that is uh moving the sensor positioner mechanically obviously you can see that it's a complex system there's too many mechanical parts and then depending upon how far these are then the mechanical coupling is going to be an issue and then if you want to do center guiding with this kind of system then it just the complexity goes pretty high pretty quick a better way to do it would be to use the guide point or the electronic guide point adjustment so you do have a sensor in the bottom the master sensor that is going to look at the position of the master web and then it's going to provide a guide point adjustment to the sensor on the top uh so that whenever the master web moves the top guide point of the top web sensor also moves and that makes sure that these two webs are coordinated if you have multiple webs uh multiple layers then we do the same thing as what we did in the in the in in the previous example the only other thing is that there are two now two different web guide uh sensors uh whose position needs to be varied so this is accomplished by slaving one of those so this is a slave actuator um and this is the uh the master actuator that is connected to this chasing sensor that is looking at the master web um this you would see uh commonly in metal industries uh in lamination processes uh again it's pretty complicated uh especially mechanically and then the synchronization it's a common problem synchronization meaning that one actuator has to be exactly synchronized with the other actuator otherwise this causes uh issues with the performance and then any lag or a slow response in one is gonna provide a overall uh worse response for your system uh the better way to do it would be to use an an electronic guide point adjustment i just used one sensor that's going to monitor this master web and then change the guide point of the other slay webs or the follower webs so that you can guide the web to that location now the main considerations with coordination is that if you have this master sensor wide enough then you can have the sensor basically look at any variation of the master web and the master in the examples that we showed there the master sensor was just used for measurement but technically you can also have a web guide on it and that web guide is going to guide the web uh on the master web and then that measurement can also be used to change the guide points on the slave or the follower webs that can be done as well and usually uh this has a good result if if we can have the web path links with these different sensors and web guides from that sensor to where the lamination process is if the web path links are the same and that provides the best results especially with dynamics and things like that but if you can't then you can use some kind of a feed forward term to compensate for the additional spans that you have to work with and then you can also do a dead band or a feed forward offset in these kind of things if you have to really put the sensor farther away from where you need to guide it so that's uh a quick overview of some of the uh things about common things irrespective of what kind of a control system that you have some advanced way of guiding concepts now we'll talk about some of the common control systems that are there in web guiding systems we're just going to quickly go through some of these things most often this is not addressed quite a bit but we're going to take a quick job at it and then there are basically three main kinds and then most of the web guides that are available in the market are fixed gain control systems and they are feedback control then proactive control is a new concept which is kind of like the future of web guiding so in a fixed gain web guiding control system as the name suggests the gain is fixed and like i said a lot of people don't really know what's inside a web guiding system there are multiple loops there's a current loop there's a velocity loop there may or may not be a position loop and obviously there's the outer edge position loop uh all of these loops have gains and these gains have to be tuned and the main problem is that this web dynamics term right here and that depends upon how fast you're running what is the tension what kind of elasticity of the web that you have how is the web guide installed all of those influence that and then anytime you have a product changeover that can significantly change any of these dynamics then the controller has to be tuned otherwise it's not going to provide a good performance most often most web guides the controllers are not well tuned that's a problem now to overcome some of these there are some other techniques called as adaptive control the main idea behind that is instead of having a fixed gain control system uh you have a controller that adapts and it learns uh based on the current conditions and it can avoid any sensor gain issues like the porosity issue that we talked about before it can overcome those it cannot adapt to the mechanical dynamics like the motor response and things like that and also the mechanical advantage of the web guiding system all of those things can be adapted too and this is a little bit more advanced control system and this this is something that is also available another way of doing this is called optimal control in this case uh what it's done is uh if you know different conditions in which your web guide is going to be operated under with what all the different materials that you're going to run all the different transport conditions and all different installations if you have to then an optimal uh controller a fixed gain controller can be designed uh so that it works best under all of these different conditions and the optimal not just means in the control system but also in the transport conditions uh the installation and things like that so this is also available i don't have a reference there in the bottom but you can look at optimal web guiding on google search and you would find papers about this there and finally uh there are other control systems especially those used in rolls-roll products is what we call as a non-linear trajectory control in this case we control trajectories for position loop velocity trajectories and also have a predictive component to it and essentially it provides you with a pretty good response uh system which is well damped and in this case we could achieve up to about 135 145 millimeters per second correction which is kind of unheard of in the industry and finally this is kind of the future of web guiding and this is what we call as proactive control instead of reacting to the edge position variations uh can we be proactive about it and this is something that we do and one of the things to hear the key thing here is that we have to first construct a performance index and then see whenever the performance index changes what are the deterrents or what are the things that are affecting that performance index is there a pattern to it and from that pattern can we see what is the root cause let's say there is an uh roller or web guide that is misaligned upstream can we detect that and then can we provide that information to the operator so that they can go in and fix that problem rather than trying to react to it an offset in a upstream process will actually limit the actuator stroke on the web guide in the downstream process and this is unnecessary if you can detect it and that's the whole idea behind a proactive control it could be offset there or a sinusoidal disturbance or any of those kind of things where it could be material process or machine and a product of control system would be able to identify and provide some solutions for it so in summary um some of the advanced web guiding concepts that we saw uh that the simplest thing that anybody can do to get a good guiding performance is to do center guiding and center guiding with wide sensors would significantly simplify your operation if you need to do dead band or if you need to do edge filtering especially you have some harder materials you can do that but essentially have a sensor that is unaffected by material property variations that will help you coordination can be achieved with electronic guide point adjustment and then the future is in proactive control do not react to the problems be proactive and kind of figure out what is the underlying cause for it and how that can be fixed in your machine that's my presentation thank you for my for your time there are some additional resources here and also my contact information um and how you can reach me unfortunately i would not be available for the q a session but i've asked one of my colleagues to be there so hopefully if you have any questions you would be able to address thank you so much for your time have a great day
April 15, 2020
Web Guiding Fundamentals: Topics in this webinar
- Web guiding Terminology
- Why we need web guides?
- Types of web guides: Terminal and Intermediate web guides
- Normal entry rule
- Main components of a web guiding system
- Unwind web guide structure
- Rewind web guide structure
- Terminal web guides design and installation considerations
- Offset-pivot guide or displacement guide design and installation considerations
- Steering or remotely pivoted web guide design and installation con
Transcript
Show full transcript (10460 words)
is going to be recorded and then we will also share the link once the webinar is done so that we can you can take a look at it after afterwards I will be your presenter I am Arvind Seshadri I'm a troll to role technologies just to give you a background I have been with troll troll for almost 6 years now and before that I was at Oklahoma State University I got my PhD in mechanical and aerospace engineering specializing in dynamics and control of roll-to-roll machines so topics such as web guiding tension control registration or some of the things that are unfamiliar with as we go along in this presentation we'll also have some polls or some questions so that we get to know a little bit more about you and what are some of the problems and hopefully we can take advantage of that and guide the presentation along the way once again we're about ready to start the webinar and as part of that let me just give you a quick poll if you can answer that really quick in the next minute or so that will help me in terms of some of the topics that will be covered today and we can look at how we can tailor that to the audience so basically we just wanted to know a little bit more about your knowledge about web guiding there are some people who might have no knowledge about web guiding there are some who might just know what a web guide is how it works or some of them are well versed in being a designer they can design web guides or design web guides into their machines or some of them could be even experts that are called upon when where you have any issues with web guiding in your operation so I'll give a just a quick minute or 30 seconds to make sure that everybody had a to answer this question okay seems like we have a pretty good mix of audience here people ranging from as people with no knowledge about web guiding and also some experts and web guiding okay thank you for taking that poll that gives me a pretty good idea on how we can proceed with the presentation okay so before we start web guiding let's just look at some of the common terminologies or names that are used for web guiding web guiding is also referred to as steering some people call us tracking depending upon whether we are guiding the edge of the web or a feature on the web it might be called as edge guiding line guiding contrast guiding more technical term would be like lateral control or lateral registration these are some common terms that are used in the academia when we are talking about guiding sometimes it's also called as CD registration CD where see these stands for cross machine Direction registration and then lateral alignment and if you're from eastern part of the world in Asia it's commonly referred to as EPC or edge position control or line position control essentially all of this means the same thing that is guiding or a web guide is used to position the web at the desired cross machine direction and it is done so that we can enable efficient transport if the web is not guided then we have issues with the web crashing into the machine quality issues wastes and things like that so why do we need web guiding all their army fully mainly for reasons why we need web guiding first and foremost is that materials are not perfect you might have a poorly bound roll that is not one properly or deliberately wound row with an oscillation on it and when we are trying to feed it into your role to the old machine you need to guide it so that it aligns with your process some materials may have thickness variation this could be like gauge band variation either during coding or forming processes especially with paper mills different gauge papers may track differently or slide differently splices whenever you have change from one role to another when you are joining two roles of web it might be a step change or it might also be like an angular misalignment of the splice and then some materials have a natural curvature to them which is called as camber so the material properties when the materials are not perfect that's going to have the web miss track in your machine it could also be due to machine itself so either you have machines with out of round rollers like a crown or a concave or a convex roller whenever you have a variation in the diameter of the roller that's a problem or the rollers are not aligned properly with respect to each other that could also cause the webs to miss track you might also have tension control issues and if you don't have enough tension you don't have traction then that's going to be an issue and whenever you have acceleration or deceleration that might also cause the web to miss track it could also be due to processes for example if you have a coding process and you have uneven coding across the width of the web that's going to cause issues with tracking and also some processes where you could have air entrained between the web and the roller that would cause the web to loose fraction and miss track so that could also be an issue and that's why we need web carry finally operators mainly when they are splicing the web or when they are putting a new parent role into their roll-to-roll machine they may not Center it or they may not put it at the right location that might also cause an issue and that might need web guiding so web guides are necessary at different locations of the machine because you might need alignment at different parts of the machine so that's that's the main thing with web guiding is you have to put a web guide in front of any process that requires web alignment just to give you an example let's say you are laminating something and we have two layers of web coming in to this lamination process at this point you would need a web guide so that you can online this layer and this layer with respect to each other the guides that are used within the machine or called as intermediate guides or they are intermediate to the machine and the guides that are used at the entry and exit of the machines or call as terminal guides so we're going to look at all of these in detail but that gives you an idea of why we need web guides and where we need web guides in terms of the location as I mentioned when you have a web guide that that is located at the entry and exit of the machine they are called as terminal web guides there are lots of names for these and some of the common names are shifting stand a shifting base a shifting side lay on role positioning stands if you're in the metals industry it might be uncoil or recoil and in other industries it might be called pay off and tension real and specifically in these presentations and in our terminologies we call them as unwind and rewind guide an unwind guide is something that is at the entry of your old troll machine while a rewind guide is at the winder or the exit of a roll-to-roll machine so these are some of the terms that are used for terminal guides and in terms of intermediate guides these are the web guides that are used within the process within the machine there are certainly multiple types of these web guides and the most common one is what is called as an offset pivot guide other names for opposite favorite guides or displacement guides positive displacement guide pivot frame or a table guide the second most commonly used intermediate web guide is a remotely pivoted guide that's a technical norm at term but most commonly it's called as a steering guide or steering roller or a swivel roller and then there are other less common web guides like an pivoted guide or center pivoted guide and then even turn bars are all available well we'll take a little bit deeper look at all of these different kinds as we go along in this presentation but most of these web guides work on a basic fundamental principle and that is what we call it as normal entry so what is normal entry say normal entry is basically is a web approaching a roller will always align itself perpendicular to the axis of rotation of the roller as you see in this video right here let me restart that as soon as the the roller on the left has a misalignment the web started to track and it started to move in such a way that it will approach the roller on the Left perpendicular to the axis of the rotation this is the fundamental principle that is used in most of the intermediate web bags that we are going to see and what's happening here is that the web is essentially behaving like a beam and the angular displacement on this left-hand side is bending the team and it's causing the beam to bend and that's what it's causing the web to track to this side there are lots of dynamics involved in this process how fast the web moves how much does it move all of those depends upon the transport conditions the what type of web it is what kind of traction you have and things like that and obviously the static behavior is that at steady state once this angle is said how much is it going to move are we going to see any movement on this side as you can notice that when this web moved the upstream roller the web was still there it was maintaining there because it was able to have enough traction so that the lateral forces at the moment that is acting there was not able to make the web move and whenever we have a motion like this bending occurs bending in term means that there are stresses developed in the web so you're going to have a tight side and a slack side and there going to be a tension profile here so these are important to understand for us in order to have a successful web guiding application or execution of a web cam so in terms of a basic web guiding system we are mainly dealing with four main items apart from the web we're mainly dealing with four main items one is the guide structure or the mechanism this is the device that is actually making contact with the web and that's the one that is need to be moved or it moves the web and there are different types of guide structures that we will go through the other component of web guiding system is an actuator so actuator is something that takes an electrical signal and then it converts that into physical motion so that it moves the guide structure so that the web can be loved rated at the desired location the third and one of the most important components of a web guiding system is a sensor the sensor is the device that provides the feedback the sensor is the one that tells us where the web is where means it's inferring the position and then finally that signal is sent to a controller and the controller is made mainly the intelligence or the brains that that takes that sensor signal and computes the corrective action that is acquired so that the actuator can move the guide mechanism to the location where we can get the desired web position again another schematic of how the components of the web guides are so web is a part of the web guiding system and then you have the mechanism there's an actuator inside the mechanism the sensor gets the position feedback of where the web is sends that information to the controller controller then computes an error and it sends the command to the actuator so that the mechanism can be moved to position the web at the right location so this is a closed-loop feedback control system that is a main part of a web guiding system so let's dive into detail about different components of the web guide first we'll start off with guide structures and look at how guide structures are with different types of web guides that we saw so first and foremost we have the unwind web guide structure in this case you have a parent role and that is feeding the web into your machine and this role is on a shifting stand or a base that is supported by typically linear bearings and then there's an actuator there that connects the moving state and with the fixed base and then there's a sensor here that is looking at the position of the web so the main objective of an unwind web guide is to ensure that the web that is fed into the process is at the desired location and because of that you have a fixed sensor that is fixed to a machine frame and then this stand actually moves in and out of the monitor that we have here it's going to go in and out and the the feedback from the sensors used to make this unwind guide move in and out so that it can position at the right location one thing I wanted to point out is that the there is a shifting idler when I say shifting idler it means that this idler is attached to this moving base the main reason why we do that is that if we put a sensor right here it is not an ideal location just because of the fact that when the diameter of this roller changes you're going to have the web plane go in and out and if that happens that's going to affect your guiding so typically you would see a shifting idler I doesn't have to be one it can be multiple it could also be a whole frame with a lot of rollers here all that we need to do is that we need to put the sensor just downstream of the last shifting idler and then the sensor is fixed to the Machine frame so that we can guide the web so those are the main things with an unwind guide now when we look at rewind guide rewind even though we call it as a guiding it's not actually guiding the web it's actually chasing the web so the the the main thing that is unique about this is that in a rewind system you have a sensor that is attached to the rewind frame all of the things in terms of the carriage it's exactly the same you have a sensor that is attached to the rewind stand so that when the rewind moves the sensor also moves and then you have a fixed idler right after this this moving sensor like I mentioned rewind is not really guiding the web it's actually chasing the web and the main reason why we do that is that we need to maintain the relative position of the web and the rewind role and if we put the sensor on a fixed frame and look at this rewind role then we will not know the relative position between those two that's the main reason why we attach the sensor on to the moving rewind stand so that the sensor gives us indirectly the position of the rewind stand and the objective is to make sure that we move the rewind stand so that the middle of the sensor or the guide point of the sensor matches to the location of the web again like I mentioned it's not really guiding the web we are chasing the web so that the the rewind role would be at the right location to get the web bound properly so just to summarize about these two terminal guides we can look at what are the things that we need to have a good rewind or unwind guiding system first of all in terms of design we need to make sure that the mechanical structure and rigidity and stiffness or design properly we are moving a big mass and depending upon the type of web maybe metals it may be thousands of pounds multiple thousands of pounds that we are trying to move and we need to make sure that the structure is rigid enough so that we can avoid any mechanical resonance so the natural frequency of the structure should be at least three to four times the operating frequency of the control system the other thing we need to consider especially with these kind of guides is that we need to size the actuator properly when we talk about sizing the actuator what we are talking about is it should have enough thrust so that it can push the mass it has enough thrust to overcome the static friction and it also has enough thrust to provide the desired acceleration to reject the disturbances or errors that may be there just like the mechanical structural rigidity we need to also make sure that the actuator coupling and the actuator stiffness are all counted for any play in the actuator coupling is going to reduce the stiffness of the overall system that's going to destabilize your system in terms of installation consideration the main thing that we want to look for in these type of guides is the location of the sensor with respect to the moving Stan either it's fixed to the machine frame or it's it moving with the machine with the carriage that's the main thing these web guides are simple that's one of the advantages of these web guides and these web guides really do not have to take advantage of the normal integral because all the rollers there are parallel to each other so there's not going to be any misalignment in them so there's going to be less amount of stresses on the web the disadvantages with these kind of web guides well first of all you need a high thrust actuator especially when you have a larger mass to move and it's not cost-effective if you really want good performance from a web guide if you wanted to reject the high frequency disturbance then this might not be a good choice for us now moving over to intermediate web guides we have a displacement web guide this is another type of one of the most commonly used web guide that you are going to see and we would recommend this as the first choice for any web guiding application one of the main reasons for that is it actually displaces the web and in this Web guide it's it's not bending the web the reason why it's not bending the web is you have this entry span and you have a 90 degree wrap and then you have the plane of the carriage right here when this carriage pivots the pivot point is shown here but that's a mistake it should have been right at the edge of right here so when when this carriage rotates pivots about the pivot point which is at this point right there these two rollers are actually moving in tandem so there's no bending in this region and then in these pans since they are perpendicular that motion is a pure twist so really there is no bending in this kind of a web guide and if the web guide is designed properly then these web guides can have one to one ratio in the sense that if you move the web guide one unit then the web will actually move one unit so that's why we we call them as a perfect web guide and I do see a question here that says that would you agree that an offset period guide acts on a different principle other than normal entry that is correct and just like I explained because these two rollers are parallel to each other there is no bending in the span and since these two entry and exit rollers are perpendicular or the wrap angle are perpendicular this span is perpendicular to the plane of motion of the web guide they are going to be in twist so there's no bending and when there is no bending there's no normal entry coming into picture there so like I mentioned the twist is an important design part and and this would be our first choice for us in terms of applying it in any web web guiding situation so in stones of installation again we want to make sure that we have a 90 degree rap at the entry and exit of the roller and then there are some considerations on how what is the span length at the entry and exit so usually you can get away with half a web width usually we recommend about one to do web bits if possible and if you have a stiffer web like metals like you might need much longer entry and exit span we want to locate the sensor as close as possible this is true for any web guide it doesn't matter if it's displacement guide unwind guide rewind guide any web guide we want to have the sensor as close as possible in the span where the guiding action takes place and then in this case the recommendation is to be within the first half of the exit span and then how long this span really depends upon how much correction you're looking for typically these carriages are allowed to pivot only about five to ten degrees so if you want larger correction then you can make these pants longer the main thing is that you need to make sure that the plane of motion of the carriage is perpendicular to the entry and exit span so that you can create a pure twist on these spans and then as long as these rollers are moving in tandem or parallel to each other then we will have the desired effect they don't have to be on the same carriage they can be on different carriages as long as we are able to move have them parallel to each other you can even have a process here you don't really have to have just two rollers you can have multiple rollers so it provides a lot of flexibility here and and and and the guiding action is actually happening in the exit span so what not to do so we don't want to install the sensor too far away or we don't want to install the sensor in the next pan this is mainly for control system purposes and stability so when the web guide makes a corrective action that action is not seen at the sensor immediately so if you're running really fast you might get away with moving these sensor it's a little farther down but if you're running slow whenever this Web guide moves here you would see that motion if the sensor is as close to the down to the exit roller as possible if you install it here or here especially when the web stops and there is a small error the web guide would keep moving and that might cause the web to break or have unintended consequences so we don't really want to have the sensor further away or a next ban and we don't even we don't also want to have a scenario where you have an angle that is not ninety degrees so as I mentioned if you have a ninety degree wrap you have twists as soon as you introduce something which is deviating more from the 90 degree you start creating bending in the web so these kind of bending is going to act as understeering the web it's going to cause bending that's going to understeer the web and it also causes distortions and guide instability so we don't really want to have any of these conditions on the contrary if you have a span exit span that is spread out like this this is going to oversteer the web again it's the bending effect that is causing that and we really don't want to do that so ideal scenario would be to have a 90 degree wrap in and out but there are other options for wrapping the web there you don't have to have it just like this what like how we showed it's an inverted u configuration you can have the web going like this or like this like a Z configuration depending upon the space and all those things and obviously you can rotate all of these 90 degrees upside down just rotate all of them so you would have about 16 different configurations that you can do with these webpage all in all need to make sure that the entry and exit span or perpendicular to the plane of motion of the web guide and all of these conditions satisfy that have the sensor as close to the web guide as possible we can satisfy that and then you can have multiple configurations for these so in summary the displacement guide the main design consideration when when somebody is asked to design a web guide displacement guide is what is the desired correction then that kind of determines our span length for the guide span other than that in in terms of installation it really depends upon how much space you have so you can design the entry in the exit span and then if you have a stiffer web you might have to exaggerate that entry and exit span make sure that we have 90-degree wrap and then wrap the web guide based on the path so one of the other parts would be in the same direction the web came in and things like that advantages these are simple to install the proper installation imports the least amount of stress on the web and then it's pretty versatile I put a disadvantage there but it's really not a disadvantage but I do want to have I do want to have that here it's like the the maximum correction that you can get is designed in so in another type of web guide where we can take advantage of steering or our bending we can get more than what the guide moves so the second choice for us would be a steering guide and in in in terms of how it works it's a little bit different you got a single roller and this is the top view and this is kind of the side view and this roller is installed on two raceways they are at an angle so the web can actually forms an arc like that so it moves and forms an arc back and forth that's that's the that's how we are changing the axis of rotation and in this Web guide we are creating a bending so there's a bending action here it's displacing as well as bending then in terms of the entry and the exit span there are some guidelines for that as well and we'll go through that this is not an ideal choice for us or this is not our first choice because as I said it's bending it so it's introducing stress if it's not installed properly it can cause wrinkles creasing web tear and edge quality edge stresses and things like that so I just wanted to stop quickly and answer a couple of questions how do we determine the minimum entry and exit span that really depends upon your stiffness of the web and things like that the average stress there is a guidelines for that that I can share later on but it really depends upon the tension the Youngs modulus of the web and then the width of the web and then the span length so there is a formula where we can get the minimum entry and exit span links and the entry and exit span need not be the same like they can have different lengths also how do you determine the correct length of the displaced displacement guide table or the guide table length is basically based on how much correction that you need like I mentioned usually the tables are made to rotate about 5 to 15 degrees so so the displacement that you need need would be let's say L is the length of the span on the guide table and theta would be the angle of displacement the correction would be L sine theta theta so that is the maximum correction you can get so based on what maximum correction you need you can get the length of the the guides ya the guide span on a displacement guide and theta is the upper limit we can say 15 degrees so okay switching back to the steering guide in terms of installation what do we need to look for well we need to make sure that the exit span is perpendicular to the plane of motion of the web guide so again the main thing that we are trying to do with this is to make sure that the exit span is in pure twist this is where the this allows us to have the least amount of stress in the web so we want to do that now the entry and the exit span length of that is also depending upon the stiffness of the web you typically need a longer entry span for a rewind guide because the that the motion of the web guide or the displacement of the web happens because of bending and so you have to follow those guidelines in terms of if you have a stiffer web you need to have a longer span so that you can allow the bending to happen but normally it's about one to five times the width of the web and then the exit span can be half a web width and there's also minimum formula for finding out the minimum spanning there in terms of other things here let me go back here and talk a little bit about the instant sender like I mentioned there is a race way to race race here and they are angled so that you can have the web guide go around an arc and the center of the arc is called the instant Center this is important we need to make sure that the instant center is within the span and it's at a certain distance about half the length of the span or up to two-thirds the length of the span again these are all numbers coming from the dynamic model of the web guide and the dynamics of the web itself and if you don't follow those conditions then you can have a web guide oversteering understeering creating an awful lot of stresses may be wrinkled slack edges tight edges and all those kind of things so but the main things that we want to look for is this angle make sure that it's 90 degrees and then you have an entry span that is pretty long you can have different wrap here we don't want to go more than 45 degrees on either side that is fine when you do that what you're doing is you're adding a twisting per se so whenever it goes away from this 90 degrees it's not pure bending that is bending and twisting that isn't Maul there and then we want to have an angle here because again when you put bending stresses here you have the possibility of that what we call its moment transfer occur here so the motion of this roller can actually move the web upstream of the guide roller so in order to avoid that we want to have certain conditions here and then we also want this span shorter so that it becomes harder for that moment transfer to occur so those are some of the guidelines for installation of a steering guide and again sensor as close as possible now what not to do same thing we don't want to put the sensor too far away one of the things that is not really evident is that we don't want to put the plane of motion of the web guide at anything other than 90 degrees it's not this angle between the entry and the exit span that needs to be 90 degrees it's actually the angle of the plane of motion of web guide and the exit roller that's what determines whether you're going to have a twisting action that's going to happen here or not so when you when you have something like that you're going to introduce bending in this span and when you start bending a short span it's not a good sign so we don't really want to do that so that's the main reason why we need to have the plane of motion perpendicular not really the entry and the exit span but the plane of motion and then like I mentioned if you have the entry span and the pre entry span longer then the entry span then you could have moment transfer happening that's something that you don't want to do either in terms of wrap angles are pretty simple you can have something going up like that or going down like that as long as we follow this condition that exit span is perpendicular to the plane of motion then we are in good shape just to summarize the design consideration desired correction is one of the main things there and the raceways that we have on the steering guides we don't want to angle them more than 25 degrees so anywhere between the like 5 to 20 degrees would be the ideal one in terms of installation steering guide is lot more complicated to install you have to consider the stiffness of the web that determines the entry span length and then you also need to make sure that you're not putting too much bending stress on the web based on how stiff your web is and then the location of the instance center which depends upon the raceway angles again that depends upon the length of the entry span so there are lots of things going on here that we need to consider for proper installation of a steering guide and that's one of the reasons why these web guides are prone to have a lot of issues because they're not properly installed in terms of advantages there they are simple so they're cost-effective it's just a single roller so it's it's it's inexpensive but it comes with other things that increase the overall cost of ownership it's hard to install a lot of attention to detail is required and a lot of these have especially because of the bending and things like that loss of traction or anything like a moment transfer occurring can actually amplify the error so a poorly installed or poorly designed steering guide can actually produce error more amplify the error then then what it's intended to do there are a few other types of web guides there are not used commonly but they are Center pivoted guide again they are going to use the normal entry rule to try to steer or guide the web so there's bending that's going to happen so we're going to have similar considerations in terms of entry span pre-entry span and exiting span because they don't have any displacement like in a steering guide you displace and change the angle of rotation in these guides it's only the angle of rotation they are usually really slow in terms of response they're not an ideal choice in in modern guiding principles but the same design considerations have to be followed whereas in a steering guide so that kind of gives us a quick summary about different web guides and how to install them and things like that so the next part of web guiding is the actuators so in terms of actuators there are lots of terminology there is involved and some of them are thrust or power how fast the accelerator is what is the correction speed what is the acceleration stroke lling mounting what type of coupling that we have and things like that actuators are pretty common or pretty standard right now it's not as as installation of a web guide or the sensor but it is an important part of a web guiding system the older actuators were either pneumatic or hydraulic you had a hydraulic pump pumping a double-acting cylinder and moving the the web guide structure these were more common in the 50s and up to about maybe 90s before the electronic electromechanical actuators started coming into the market so you could have pneumatic actuators or hydraulic actuators the hydraulic actuators have the advantage that it can provide pretty high trust and can shift large loads pretty quickly even now in metals industry hydraulic actuators are pretty common you can see them but the problems are that it's a problem with maintenance you need to balance the valves and stuff like that change the filters they could cost leak and this could contaminate your product and then the precision and accuracy that you can get with an electronic actuator or electric actuator is not something that you can expect in an hydraulic actuator so most web guides nowadays are going to use electromechanical actuators like what I have shown here these actuators usually have a motor that drives a belt pulley kind of a system and there's usually a lead screw a ball screw or a roller screw that converts the rotary motion into linear motion at the end of the actuator so some some common terminologies that you would see with actuators are what is the maximum current voltage power whenever we have something with the lead screw or a pitch then that's a common term that you're going to see what is the lead of the actuator pitch of the actuator gearing ratio backlash is another thing that you would commonly see with electric actuators especially with low end lead screw actuators and resolution again what is the smallest movement that an actuator can produce that's another term bad drive is some a common terminology that you would see especially if you are installing a web guide that has to work against gravity and then types of actuators you have inline and reverse parallel some actuators have limit switches or n stops and then type of motor used in the actuator you would commonly see servos stepper brushed or brushless DC motor so actuators are providing the driving force to the guide structure so that it can position the web in terms of trust the trust is the amount of force that is exerted by the actuator to move the guide structure and this trust really depends upon as we saw before mass of the structure that we are trying to move what is the friction there how fast you want to move and sometimes gravity as well if you are acting against gravity in terms of sizing actuators these are some of the things that we would need to know to size an actuator properly web blind speed mainly because if you have a slow-moving web the the the the maximum disturbance frequency that you can get really depends upon the speed of transport of the web so if you're just moving at 100 feet per minute you might not need a high dynamic response while if you are moving at really high speed you might need a much higher dynamic response that's the main reason why we need that and then the the dynamic response is related to the acceleration acceleration is related to the thrust so that's why line speed becomes important guide structure weight and roll weight again if you are trying to move a big mass we need to know that what type of bearing you are using so that what is the breakaway force that we need to overcome based on the coefficient of friction of the bearing and then what kind of disturbances we are trying to correct for again like I said they there is a correlation between the amount of disturbance that can propagate through a roll-to-roll machine and that really depends upon the speed of the web the faster you go higher frequency disturbances can go through so the web access like a low-pass filter and then the acceleration and then if you have to look at any gravitational effects so these are some of the key factors that are involved in properly sizing an actuator but like I said actuators are pretty straightforward nowadays just need to have some basic questions answered and then we'll be good to go one of the most important parts of web guiding system is the sensor it is important because what you can't measure you can't control so if you have a poor sensor and you're not able to measure the position properly then there's no way that we can get the accuracy that we need in terms of sensor terminologies range resolution accuracy linearity those are some things that you would see type of sensors infrared optical ultrasonic air type of things that you are trying to look for in terms of web position or you're trying to look at edge of a web or you're trying to look for a line on the web or a contrasting feature on the web how much how fast can the sensor measure and then passed line and plane change these are not important nowadays but older ultrasonic sensors have issues with passed line changes so you can't have the web too close to the ultrasonic emitter because it might reflect the sound waves in a way that doesn't provide an accurate measurement and then temperature drift again ultrasonic sensors can have issues with temperature drift when we have the piezoelectric crystal frequency changes then what kind of a signal output that you get from the sensor that's some of the terminologies so essentially a range of a sensor is what is the maximum lateral displacement that the sensor can measure a most often for web guiding applications range is not that important just because of the fact that you're controlling you're going to bring it in but it does become a critical when you have web with changes and things like that so most often range is like how much change in the lateral position that you can measure with the sensor resolution is the minimum lateral position change that the sensor can see so if you want to guide a web to five thousandth of a inch then you better have it a sensor that can have 4 X or 2x higher resolution than the guiding accuracy accuracy is basically an indication of how close the sensor measurement is to the real measurement this becomes important for certain types of sensors that are affected by materials material properties like opacity porosity and things like that so this is an important characteristic of a sensor and then linearity is like what how consistent is your measurement with respect to the actual position across the entire range of the sensor that's what linearity means so in terms of sensing why is it important like I mentioned some sensors have issues with material properties like opacity porosity or reflectivity or they may be affected by environmental issues such as air flow temperature changes or vacuum and things like that so if we can't measure we can't control so that's why sensing is an important part of having a good guiding performance most often you would see these type of sensors we refer to as opposing beam or fork-style or horseshoe style there are lots of different names for it basically how this works is you have a one omitting a certain type of signal and the other arm receiving that signal and then the web that goes in between it blocks it it's a pretty simple technology work sensing principle and it works well for a lot of different cases the problem happens whenever depending upon this type of sensor signal that you have if the web allows that signal to leak through when it went when it's blocked by the web that's where the problem act occurs so we talked about linearity the solution range all of those things are affected by this kind of sensor whenever that change occurs this sensing signal can be air it could be optical like visible light or infrared light or even UV light and then it could also be sound like ultrasonic it really doesn't matter and then whether this material is opaque or porous to that signal is what it matters in terms of how well you can guide and often manufacturers recommend different sensors for different materials and different conditions so you will have a plethora of sensing technologies out there like I said the main disadvantages is material dependent gain change occurs and then requires calibration if you want to get a really good guiding performance there are other sensor technologies out there like ours which are not affected by material properties and some of the environmental conditions I'm not going to go into detail about our sensor technology here but just going to give you a quick overview it's basically a high accuracy direct measurement or absolute measurement and then our resolution does not depend upon the range and it can work with any material I'll give you some resources the end of the presentation so that you can take a look at our stuff so that's the sensor so finally the final component of the web guiding system is the controller so the controller is basically the central processor sir that takes the sensor input and then computes what the corrective action needs to be and then it sends that information to the actuator nowadays the controllers also include a human machine interface like an operator interface but previously the controller could be standalone it doesn't really didn't really have an interface and even the controller could be analog in a sense of electrical analog or pneumatic analog controllers so basically a controller is taking the sensor signal and then making the necessary computation so that the actuator can be positioned at the desired location in terms of terminology gain is one of the most common things that you're going to hear in controllers that's basically saying how quickly or what kind of a dynamic response that you need that's basically the gain is going to do that other things that you're going to see is operating voltage power consumption whether you have a operator interface or not and then whether this is a controller for a servo motor or stepper motor or whatever that is they have drives or drivers for it how many sensor inputs you have does it have Ethernet connectivity does it have remote control and stuff like that in terms of the control structure most control systems have web guide control systems have this kind of a structure where you have a fixed gain proportional control and you really don't need anything more than a proportional control for a web guide because there's integrator built into it but usually you have something like you have a motor it might have a current loop it might also have a velocity loop with a tachometer or something like that and then you have a guide structure which has its own transmission ratio and there's the web dynamic which is unknown web dynamics means that if you move the guide 1mm how much is the web going to move that really depends upon transport conditions the stiffness of the web tension and all those kind of things and then finally you have a sensor that measures the edge position and then it sends that to a position controller that's going to drive all of these loops so this is a pretty simple architecture for most web guide controllers they are fixed gain and most often they are detuned because of the stability and all the other reasons most web guides their controller is kind of detuned for the conditions if you want to get the best out of it you would need to retune them and the tuning has to be based on the optimal performance because the web dynamics is unknown most often DC motors or DC servo motors or stepper motors are used in this kind of a control structure it's pretty common there are some other advanced control technologies which are like adaptive control where the controller can adapt or learn on the fly and tuning may not be required when we say learning on the fly it means that maybe it adapts to sensor gain changes or the sensor the dynamics of the web and all those kind of things it's possible that we can have a controller that can adapt in our case we have a pretty similar structure as the one I showed in the first one it's still a fixed game controller but with with some motion control aspects built into it in terms of s curving the position and having trajectories for velocity we can increase the stability of the controller and provide a pretty aggressive output performance again pretty similar you can have a current loop a position loop if you have an encoder and then position of the actuator here and then the finally the the web position which includes the web dynamics just to give you an idea we have a lot of different things that we can do with the controller but the dynamics is basically if you move the this is showing a step response open-loop step response for a web this was like a nonwoven web that we had at different speeds and see how it behaves and you can see that when you have a step it I mean even though it's open-loop it's trying to get there and and the dynamics open loop dynamics is different based on how fast you're running so faster you are running it gets to that desired location as fast as possible but the slower you are running it takes longer to get to that desired location again this is an open loop response this is the the the final part of the whole web guiding thing which is the dynamics of the web now if we have add a controller to it and this was our controller then we can have a much better response and we can actually push the web guide in this case at the two different speeds that we were running at this was the reference change and this was the actual response of the web guide at the sensor and then when we have another sensor installed one span downstream you can see how long it takes for that to go to again when we have a step response you can we were able to get up to about 170 millimeters per second or like seven inches per second this is about close to 70 percent improvement over an open-loop response and again this is closed-loop that means you are actually actively guiding the web so with the proper control structure design you can get like a high bandwidth system close to six Hertz or something like that and then even get a well damped system so you can actually have an aggressive correction if you need to in terms of the characteristics of a good web guiding system is that it should have the ability to attenuate disturbances easy to tune obviously it needs to be stable has good processing power so that it can process multiple sensors have industrial Ethernet connectivity these are for advanced functionalities and then sparks and intelligence for industry 4.0 so the final question here is that well you have a web guide and we talked about all these different things what is the accuracy or how how accurately can you guide a web it actually depends like I mentioned there are lots of different parameters there that are going to affect the accuracy of the web guide at them if you are just dealing with the steady-state error we can expect plus or minus 0.25 millimeters if you have a good machine and a perfect material this is what you can expect and higher accuracies are possible like in printed electronics and stuff like that you can get much higher accuracy but again we're dealing with steady-state errors you have a good edge and all those kind of things this is possible but the problem is that most web guides are going to come in to transient errors these are either disturbances or materials or material properties that are going to affect the the disturbance at the web guide now if you are trying to correct a transient error it really depends upon what is the magnitude of the error what is the frequency of the error and so on and so forth and another important thing that we need to consider is that these transient errors can actually propagate downstream of the sensor and these are called what are called as V generation even though you correct it at the sensor you don't really know the angle at which the web is approaching and that can cause what is called as waves downstream again if you you won't have good guiding performance if you have wrinkles I mean if the web is wrinkling that is going to cost the edge to move back and forth there's no way that you can have good guiding performance with that or edge girl or flutter or sometimes plane change can also have that effect if you have large magnitude later and your stroke of the actuator is limited or the correction that the WebKit can provide is limited then you can expect good guiding performance whenever the actuator pops out on either side of its stroke again if you use a lower bandwidth actuator and you have a higher frequency error you can expect good guiding performances and sensor if you don't have a good sensor or if it has gain changes then you can expect good guiding performance and then improper installation can actually amplify the error so that's another thing that we can't expect anyway so just to summarize the factors affecting we talked about a machine related process related material related and the web guide related which is like the stroke deadband actuator backlash correction stroke limit and things like that so in terms of design requirement a good knowledge of the conditions like web speed location thickness stiffness environment tension desired correction all of these are important for us to have a good well-designed web guide and then obviously if you have a good understanding of all of these we will do well I know we're running out of time this is my last slide and I just wanted to bring this up to summarize it just to summarize our fundamentals of web guiding well web's machines process nothing is going to be perfect so we do mostly we need web guides to correct for it most of the web guiding or the the traction or the steering of the web happens because of the normal entry rule so whenever you have a misaligned roller or an out of round roll all of those things are going to affect the the disturbance created within the machine the sensors when you're installing it on a web guide we need to be installed as close as possible to the web guide and then the web guide has to be located as close to the process that needs alignment we cannot have an unwind and have a guide on the unwind and then have ten spans later you have a process where you meet see where you need the alignment we need to have the web guide right next to the process where the alignment is needed none of these action of the web guide will have any effect if we don't have traction traction is indirectly related to tension so if you don't have good tension or traction would be in the web and the roller you cannot expect good guiding performance proper installation depending upon the type of web guide we have is important and then also improper installation can actually adversely affect your material it may wrinkle the material create edge stresses or instability and finally the overall guiding performance it's actually a function of the sensor the actuator the controller even the web itself so in order to have all of those we need to have a pretty good all of these have to be pretty good that's the summary and I do have a slide which shows some additional informations on different things that we have on our website I will leave this for a quick second and I was supposed to have some polls that I was supposed to share with you but I didn't so I'm going to have a sum of these put up right now and if you can answer these questions that would be great basically we want to make sure that this webinar was useful to you or not and also know what would be something that you would be interested in in the future and what are some of the biggest problems that you see in your operation is it web guiding is attention related it's a raw material related or process quality issues okay so while I have these polls on let's see if I have anything that I have missed in the Q&A okay so there was a question about why would you want a deliberately oscillated role well there are some times where you have gage band variation that means the thickness of the web across the width of the web is different this is especially true when you are folding the web or like in shrink sleeve applications and if you guide the web at the same location the gauge band variation is going to have different stresses on the bound role so the hardness of the roll along the width of the web would be different and and that causes problems in terms of telescoping and when you transport the rolls and things like that it might have some issues so what they do is they deliberately move the web guide back and forth so that the thickness variation is evenly spread across the entire width of the roll so that's why you want to deliberately oscillate the roll back and forth these are only when when you're converting process has an intended thickness difference like when you are sealing or closing and sealing a web guide there's a question about master slave application what is that and could you give an example okay so whenever you have a lamination process you have one layer of the web that you need to laminate with respect to another layer of the web that's when it would be important to have a master slave so one layer of the web can be guided to a location and then the other layer of the web its reference or the guide point would be dynamically adjusted so that you can match those two webs together it can also be done if both these web guides are guided to the same machine reference but usually that's a problem because when you're moving the sensor you don't know if you put them exactly at the same machine reference so in that case you would have one web as a master and then the slave web guide will have its guide point changed based on the based on the master position okay so let's see got another poll here what are your biggest challenges with web guides is it the lack of performance is the complexity of setting them up or doesn't have enough features what is the biggest challenge for that for you and finally in terms of future topics what would be of interest in the future webinars we talked about fundamentals of web guiding here we didn't talk about anything related to web guiding applications like edge guiding Center guiding line guiding contrast cutting those things we didn't talk about there are advanced web guiding concepts as well are you interested in measurement and sensing technology or general web handling topics and would you be interested in training on roll-to-roll products okay so there is a question from Jay and let's see if I can allow Jay to talk oops that went away okay there we go okay Jay I think your microphone should be enabled Jade okay well hopefully we were able to give you a little bit about the fundamentals of web guiding and let's see if and show some of the results here Oh anyway thank you so much for your time this afternoon and thank you for giving us an opportunity to talk a little more web guiding and web guiding fundamentals I have put our contact information there if you have any other questions please let us know either by email or calling us that we have this webinar recorded and now what we could do is it will share the video of the webinar in a follow-up email and if nobody else has any other questions we would stop the session and appreciate your time thank you everyone have a good day
Different terms related to web guiding are discussed in this article.
Web Guiding
Web guiding is the process of regulating the cross machine position of the web while the web is transported over the rollers in roll-to-roll processing machinery. Other terms for web guiding include:
What are Pneumo-Hydraulic Web Guides?
Many displacement guides, steering guides, unwind / rewind guides manufactured in the 1960’s, 1970's, 1980’s and 1990's were controlled using both pneumatic and hydraulic control systems which are often referred to as pneumo-hydraulic web guides. These web guide were really common before the mass adoption of the electronic (analog and digital) controllers and electric actuators.

February 3, 2018
Check out this video to see how easy it is to simply plug in and use our web guiding system without any type of setup or calibration.
Transcript
Show full transcript (324 words)
this is February Lascaux of rolls roll technologies in our series of showing you about that some features of our webcast and today we want to show you how simple it is to install the cat just to put it in operation right now we're showing you a 12 inch web guide which if we have installed in our testbench and it's a really simple it's four points where we actually fix it to the Machine and what happened the same one you're in your facility now in this case we already thread the machine the web guide with some the two and we have position the sensor where we would like to show a habit position as you can see it's a very simple sensor so it only has one face and so it's a taken away from the u-shape remember our sensors can actually detect any kind of material without having to be adjusted and now as you can see on the back side of our guide you can see that there are only two positions that we're going to plug into the first one is we plug in the sensor we have actually identified the sensor position sensor 1 and then we connect our power supply just fix it to it and if we look at the other side that as you can see the web guide reacted because it's already in operation let's go to the other side to the front and you can see our panel right here see and now it's indicating that it has located the sensor and it's ready to go and now I'm going to put this machine to work as you can see this is a very simple installation what we did let's just plug into two cables and when the key is operational come with us to Roloff acknowledges and this melts you understand more or less and how I guess didn't plug in place